
Page 44 - 无损检测2022年第八期
P. 44
韩 超,等:
一种粉末材料夹杂物的新型数字射线检测方法
量, 保证粉 末 材 料 中 的 夹 杂 物 含 量 符 合 规 定。 磁 得到了显著 提 高, 但 由 于 X 射 线 成 像 过 程 中 的 各
粉检测需 要 将 磁 粉 置 于 被 测 件 表 面, 渗 透 检 测 也 个环节都 有 可 能 产 生 噪 声, 为 避 免 噪 声 对 图 像 中
需要将渗 透 剂 涂 抹 于 被 测 件 表 面, 因 此 这 类 接 触 夹杂检测 准 确 度 的 影 响, 需 要 对 图 像 进 行 降 噪 处
式检测方法并不适用于检测粉末材料。而 X 射线 理。文章使 用 中 值 滤 波 进 行 降 噪, 中 值 滤 波 可 以
检测技术凭借其成像直观、 检测效率高等优点, 成 在保持图像边缘信息的同时有效消除图像中的孤
为粉末材料杂质和缺陷检测的主要手段。 立噪声点, 中值滤波公式可表示为
(
数字射线成 像 检 测 ( DR ) 是 一 种 基 于 X 射 线 g x ) = med { ( k )} ( 2 )
f
(
原理, 使用 平 板 探 测 器 代 替 传 统 胶 片 成 像 的 无 损 式中: x 为图像中待滤波点坐标; ( k ) 和 g x ) 为滤
f
检测技术 [ 3-4 ] 。 DR 技 术 成 像 具 有 动 态 范 围 大、 成 波前后的图像; k 为以点x 为中心方形掩膜中的点。
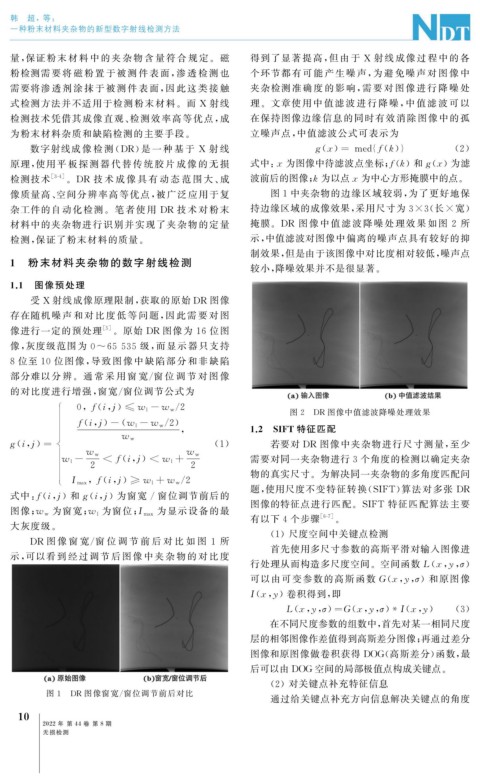
像质量高、 空间分辨率高等优点, 被广泛应用于复 图 1 中夹杂物的边缘区域较弱, 为了更好地保
杂工件的自动化检测。笔 者 使 用 DR 技 术 对 粉 末 持边缘区域的成像效果, 采用尺寸为 3×3 ( 长 × 宽)
材料中的夹杂物进行识别并实现了夹杂物的定量 掩膜。 DR 图 像 中 值 滤 波 降 噪 处 理 效 果 如 图 2 所
检测, 保证了粉末材料的质量。 示, 中值滤波对图像中偏离的噪声点具有较好的抑
制效果, 但是由于该图像中对比度相对较低, 噪声点
1 粉末材料夹杂物的数字射线检测 较小, 降噪效果并不是很显著。
1.1 图像预处理
受 X 射线成像原理限制, 获取的原始 DR 图像
存在随机 噪 声 和 对 比 度 低 等 问 题, 因 此 需 要 对 图
像进行一定的预处理 [ 5 ] 。原始 DR 图像为 16 位图
像, 灰度级范围为 0~65535 级, 而显示器只支持
8 位至 10 位图像, 导致 图 像 中 缺 陷 部 分 和 非 缺 陷
部分难以分 辨。 通 常 采 用 窗 宽 / 窗 位 调 节 对 图 像
的对比度进行增强, 窗宽 / 窗位调节公式为
f
j ≤ w l-w w 2
0 , ( i ,) /
图 2 DR 图像中值滤波降噪处理效果
/
(,) (
f ij - w l-w w 2 )
, 1.2 SIFT 特征匹配
(,)
g ij = w w ( 1 ) 若要对 DR 图像中夹杂物进行尺寸测量, 至少
w w w w
(,)
w l- <f ij < w l+ 需要对同一夹杂物进行 3 个角度的检测以确定夹杂
2 2
物的真实尺寸。为解决同一夹杂物的多角度匹配问
/
, (,)
I max f ij ≥ w l+w w 2
题, 使用尺度不变特征转换( SIFT ) 算法对多张 DR
式中: ( i ,)和 g ij 为窗宽/窗位调节前后的
(,)
f
j
图像的特征点进行匹配。 SIFT 特征匹配算法主要
为显示设备的最
有以下 4 个步骤 。
图像; w w 为窗宽; w l 为窗位; I max [ 6-7 ]
大灰度级。
( 1 )尺度空间中关键点检测
DR 图 像 窗 宽 / 窗 位 调 节 前 后 对 比 如 图 1 所
首先使用多尺寸参数的高斯平滑对输入图像进
示, 可以看 到 经 过 调 节 后 图 像 中 夹 杂 物 的 对 比 度
行处理从而构造多尺度空间。空间函数 L ( x , , σ )
y
可以由可变参数的高斯函数 G ( x , , σ )和原图像
y
I ( x , ) 卷积得到, 即
y
L ( x , , σ ) G ( x , , σ ) * I ( x , ) ( 3 )
y
=
y
y
在不同尺度参数的组数中, 首先对某一相同尺度
层的相邻图像作差值得到高斯差分图像; 再通过差分
图像和原图像做卷积获得 DOG ( 高斯差分) 函数, 最
后可以由 DOG 空间的局部极值点构成关键点。
( 2 )对关键点补充特征信息
图 1 DR 图像窗宽 / 窗位调节前后对比
通过给关键点补充方向信息解决关键点的角度
0
1
2022 年 第 44 卷 第 8 期
无损检测