
Page 36 - 无损检测2022年第五期
P. 36
郭 猛,等:
相控阵超声检测用喷水耦合喷嘴的优化设计
时间浸泡等优点, 得到国内外学者的广泛关注。王炳
[ 5 ]
方等 对喷水速度、 喷水距离和喷水角度等参数对超
声检测的影响进行了研究, 提出了合理的参数选择范
围; DEUTSCH 等采用喷水耦合的方法对焊缝进行超
声检测, 证明了喷水耦合对复杂构件的适用性。目前
喷水耦合存在的缺点主要是由射流不稳定而引起的声
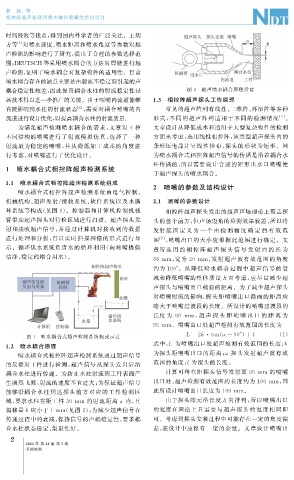
耦合稳定性较差, 因此提高耦合水柱的射流稳定性是 图 2 超声喷水耦合原理示意
该技术得以进一步推广的关键。由于喷嘴内流道能够 1.3 相控阵超声探头工作原理
[ 6 ]
直接影响到水柱的射流状态 , 需要对耦合喷嘴的内 常见的超声阵列有线性、 二维阵、 环形阵等多种
流道进行设计优化, 以提高耦合水柱的射流质量。 形式, 不同的超声阵列适用于不同的检测情况 [ 7 ] 。
为满足超声检测喷水耦合的需求, 文章对 4 种 文章设计从降低成本和适用于大型复杂构件的检测
不同结构的喷嘴进行了射流模拟仿真, 选择了一种 方面来考虑, 选用线性相控阵, 该类型超声探头内的
射流最为稳定的喷嘴, 并从降低加工成本的角度进 条形压电晶片呈线性排布, 探头的形状为矩形。因
行考虑, 对喷嘴进行了优化设计。 为喷水耦合式相控阵超声信号的传播是沿着耦合水
柱传播的, 所以需要设计合适的矩形出水口喷嘴便
1 喷水耦合式相控阵超声检测系统
于超声探头的喷水耦合。
1.1 喷水耦合式相控阵超声检测系统组成 2 喷嘴的参数及结构设计
喷水耦合式相控阵超声检测系统由电气控制、
机械机构、 超声发射 / 接收系统、 软件系统以及水循 2.1 喷嘴的参数设计
环系统等构成( 见图 1 )。控制器和计算机控制机械 相控阵超声探头发出的超声声场理论上覆盖探
臂带动超声探头对待检区域进行扫描。超声探头发 头的整个前方, 但声场边角的检测效果较差, 所以将
射和接收超声信号, 并通过计算机对接收到的数据 发射范 围 定 义 为 一 个 由 检 测 精 度 确 定 的 有 效 范
进行处理和分析, 再以实时扫描图像的形式进行显 围 [ 8 ] , 喷嘴出口的大小应根据此范围进行确定。文
示。循环供水系统负责水的循环利用( 向喷嘴提供 章所选 用 的 相 控 阵 超 声 探 头 信 号 发 射 面 的 长 为
洁净、 稳定的耦合用水)。 66mm , 宽为 20 mm , 发射超声波有效范围的角度
约为 100° 。从降低喷水耦合过程中超声信号的衰
减和降低喷嘴的整体质量方面考虑, 应尽量减少超
声探头与喷嘴出口截面的距离。为了减少超声探头
对喷嘴射流的影响, 探头距喷嘴出口截面的距离应
略大于喷嘴过渡段的长度。所设计的喷嘴过渡段的
长度 为 90 mm , 超 声 探 头 距 喷 嘴 出 口 的 距 离 为
95mm 。喷嘴出口处超声检测有效范围的长度为
+
图 1 喷水耦合式超声检测系统构成示意 L = 2h· tan ( a-90° ) l ( 1 )
1.2 喷水耦合原理 式中: L 为喷嘴出口处超声检测有效范围的长度; h
喷水耦合式相控阵超声检测系统通过超声信号 为探头距喷嘴出口的距离; a 探头发射超声波有效
的反馈对工件进行检测, 超声信号从探头发出后沿 范围的角度; l 为探头的长度。
耦合水柱进行传递。为防止水柱射流到工件表面产 计算可得在距探头信号发射面 95mm 的喷嘴
生剧烈飞溅, 射流的速度不宜过大; 为保证超声信号 出口处, 超声检测有效范围的长度约为 100mm , 因
能够沿耦合水柱到达探头前方对应的工件 检测区 此所设计喷嘴出口长度为 100mm 。
域, 要求水柱在距工件 30mm 的射流距离a 内, 且 由于探头阵元沿长度方向排列, 所以喷嘴出口
偏移量b 应小于1mm ( 见图2 ); 为减少超声信号在 的宽度在理论上只需要与超声探头的宽度相同即
传递过程中的衰减, 保持信号的声耦稳定性, 要求耦 可。考虑到探头安装过程中可能存在一定的角度偏
合水柱状态稳定、 集束性好。 差, 在设计中应保有一定的余量。文章设计喷嘴出
2
2022 年 第 44 卷 第 5 期
无损检测