
Page 37 - 无损检测2022年第一期
P. 37
徐 娜, 等:
粉末高温合金微缺陷的超声环形阵列全聚焦成像检测
接近于聚焦深度时, 会表现出极好的检测灵敏度和
信噪比, 而远离聚焦深度位置的缺陷, 其检测灵敏度
和信噪比会显著下降。这说明该技术存在检测灵敏
度和信噪比波动大的问题, 还可能会导致缺陷漏检。
为了解决上述问题, 在实际检测时只能设置较
多的聚焦深度, 而过多的聚焦深度会降低采集的重
复频率, 进而影响检测效率, 因此, 文章提出采用全
矩阵捕捉法采集数据, 并基于全聚焦成像的数据后
处理方法, 以最大化提高在探头轴线方向上的聚焦
点数量。
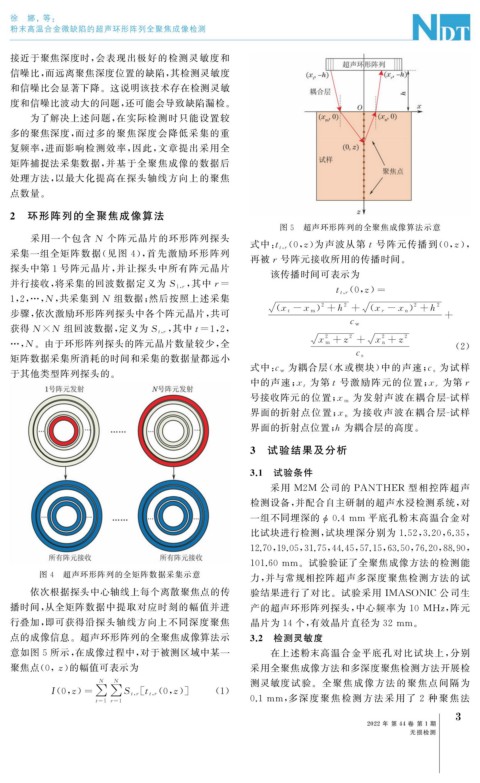
2 环形阵列的全聚焦成像算法
图 5 超声环形阵列的全聚焦成像算法示意
采用一个包含 N 个阵元晶片的环形阵列探头
式中: t t , r 0z ) 为声波从第t 号阵元传播到( 0 , z ),
(,
采集一组全矩阵数据( 见图 4 ), 首先激励环形阵列
再被r 号阵元接收所用的传播时间。
探头中第 1 号阵元晶片, 并让探头中所有阵元晶片
该传播时间可表示为
, 其中r=
并行接收, 将采集的回波数据定义为 S 1 , r
t t , r 0z ) =
(,
1 , 2 ,…, N , 共采集到 N 组数据; 然后按照上述采集
2
2
2
) +h + ) +h 2
步骤, 依次激励环形阵列探头中各个阵元晶片, 共可 ( x t -x m ( x r -x n +
c w
, 其中t=1 , 2 ,
获得 N×N 组回波数据, 定义为 S t , r
2
2
2
…, N 。由于环形阵列探头的阵元晶片数量较少, 全 x m +z + x n +z 2 ( 2 )
矩阵数据采集所消耗的时间和采集的数据量都远小 c s
为试样
式中: c w 为耦合层( 水或楔块) 中的声速; c s
于其他类型阵列探头的。
为第r
中的声速; x t 为第 t 号激励阵元的位置; x r
为发射声波在耦合层 - 试样
号接收阵元的位置; x m
为接收声波在耦合层 - 试样
界面的折射点位置; x n
界面的折射点位置; h 为耦合层的高度。
3 试验结果及分析
3.1 试验条件
采用 M2M 公司的 PANTHER 型相控阵超声
检测设备, 并配合自主研制的超声水浸检测系统, 对
一组不同埋深的 ϕ 0.4mm 平底孔粉末高温合金对
比试块进行检测, 试块埋深分别为 1.52 , 3.20 , 6.35 ,
12.70 , 19.05 , 31.75 , 44.45 , 57.15 , 63.50 , 76.20 , 88.90 ,
101.60mm 。试验验证了全聚焦成像方法的检测能
图 4 超声环形阵列的全矩阵数据采集示意 力, 并与常规相控阵超声多深度聚焦检测方法的试
依次根据探头中心轴线上每个离散聚焦点的传 验结果进行了对比。试验采用 IMASONIC 公司生
播时间, 从全矩阵数据中提取对应时刻的幅值并进 产的超声环形阵列探头, 中心频率为 10 MHz , 阵元
行叠加, 即可获得沿探头轴线方向上不同深度聚焦 晶片为 14 个, 有效晶片直径为 32mm 。
点的成像信息。超声环形阵列的全聚焦成像算法示 3.2 检测灵敏度
意如图 5 所示, 在成像过程中, 对于被测区域中某一 在上述粉末高温合金平底孔对比试块上, 分别
聚焦点( 0 , z ) 的幅值可表示为 采用全聚焦成像方法和多深度聚焦检测方法开展检
N N 测灵敏度试验。全聚焦成像方法的聚焦点间隔为
I ( 0 , z ) = ∑∑ S t , r t t , r 0z )] ( 1 ) 0.1mm , 多深度 聚 焦 检 测 方 法 采 用 了 2 种 聚 焦 法
[ (,
t =1 r=1
3
2022 年 第 44 卷 第 1 期
无损检测