
Page 36 - 无损检测2022年第一期
P. 36
徐 娜, 等:
粉末高温合金微缺陷的超声环形阵列全聚焦成像检测
度和信噪比, 可检出 ϕ 0.4mm-18dB 平底孔当量
的缺陷。
随着工业生产和科学技术的发展, 相控阵超声成
为近年来无损检测技术的研究热点之一, 包括基于实
时成像的常规相控阵超声检测技术和相控阵超声后
处理成像技术 [ 4-5 ] 。采用的阵列探头由一组相互独立
的压电晶片组成, 改变不同阵元晶片的形状和排列方
式, 可设计出一维线阵、 二维面阵、 环形阵列等多种类
型的探头, 其中, 环形阵列探头的声场呈完全轴对称
分布 [ 6 ] , 具有优越的轴向聚焦能力, 能由较少数量的
图 1 线阵探头的声场分布
阵元在中心轴线上形成高分辨率的聚焦声场, 较符合
粉末高温合金材料的高灵敏度检测要求。
基于超声环形阵列的常规相控阵超声检测技术
通过控制发射的延迟时间将声束聚焦于某一深度位
置, 会使得不同深度声场的分布不均匀, 存在检测灵
敏度和信噪比波动大等问题 [ 7 ] 。相控阵超声后处理
成像技术采用离线计算的方式对采集的全矩阵超声
数据进行后处理成像, 一次数据采集即可同时实现
对声束可达区域内各个位置的聚焦检测, 其中全聚
焦成像方法就是一种最常用的相控阵超声后处理方
图 2 环形阵列探头的声场分布
法 [ 8-9 ] 。根据超声环形阵列在三维空间内可沿轴向
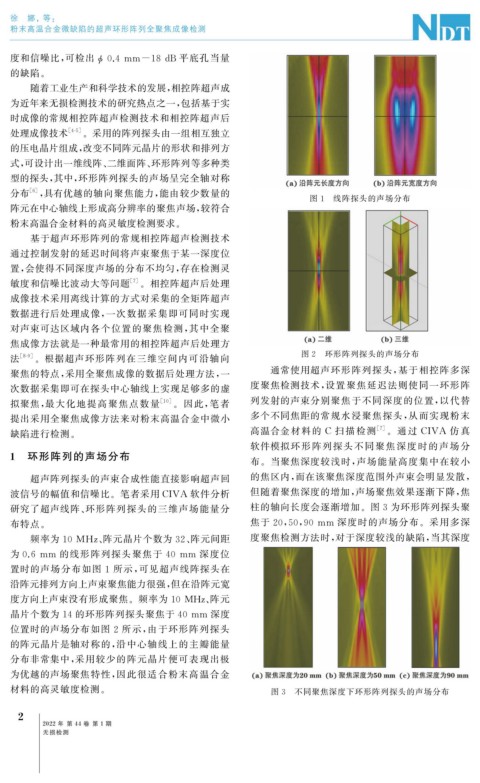
聚焦的特点, 采用全聚焦成像的数据后处理方法, 一 通常使用超声环形阵列探头, 基于相控阵多深
次数据采集即可在探头中心轴线上实现足够多的虚 度聚焦检测技术, 设置聚焦延迟法则使同一环形阵
拟聚焦, 最大化地提高聚焦点数量 [ 10 ] 。因此, 笔者 列发射的声束分别聚焦于不同深度的位置, 以代替
提出采用全聚焦成像方法来对粉末高温合金中微小 多个不同焦距的常规水浸聚焦探头, 从而实现粉末
高温合金材料的 C 扫描检测 [ 7 ] 。通过 CIVA 仿真
缺陷进行检测。
软件模拟环形阵列探头不同聚焦深度时的声场分
1 环形阵列的声场分布 布。当聚焦深度较浅时, 声场能量高度集中在较小
超声阵列探头的声束合成性能直接影响超声回 的焦区内, 而在该聚焦深度范围外声束会明显发散,
波信号的幅值和信噪比。笔者采用 CIVA 软件分析 但随着聚焦深度的增加, 声场聚焦效果逐渐下降, 焦
研究了超声线阵、 环形阵列探头的三维声场能量分 柱的轴向长度会逐渐增加。图 3 为环形阵列探头聚
布特点。 焦于 20 , 50 , 90mm 深度时的声场分布。采用多深
频率为 10MHz 、 阵元晶片个数为 32 、 阵元间距 度聚焦检测方法时, 对于深度较浅的缺陷, 当其深度
为 0.6 mm 的线形阵列探头聚焦于 40 mm 深度位
置时的声场分布如图 1 所示, 可见超声线阵探头在
沿阵元排列方向上声束聚焦能力很强, 但在沿阵元宽
度方向上声束没有形成聚焦。频率为 10 MHz 、 阵元
晶片个数为 14 的环形阵列探头聚焦于 40mm 深度
位置时的声场分布如图 2 所示, 由于环形阵列探头
的阵元晶片是轴对称的, 沿中心轴线上的主瓣能量
分布非常集中, 采用较少的阵元晶片便可表现出极
为优越的声场聚焦特性, 因此很适合粉末高温合金
材料的高灵敏度检测。 图 3 不同聚焦深度下环形阵列探头的声场分布
2
2022 年 第 44 卷 第 1 期
无损检测