
Page 76 - 无损检测2021年第八期
P. 76
陈 恺, 等:
基于 Ac q uire软件的相控阵超声曲面自适应仿形方法
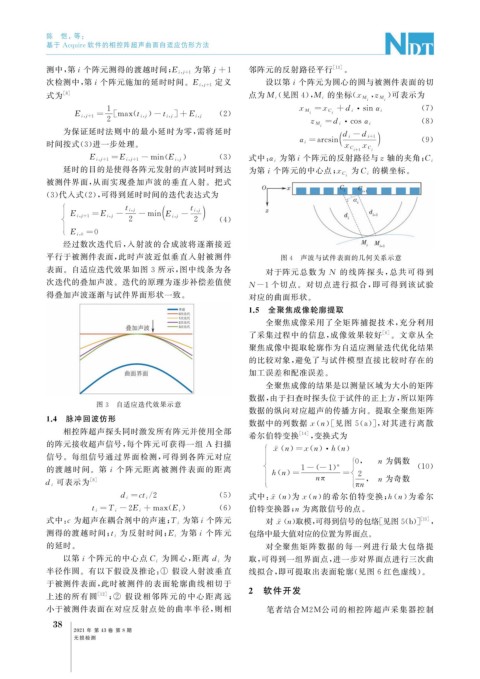
为第 j+1 邻阵元的反射路径平行 [ 13 ] 。
测中, 第 i 个阵元测得的渡越时间; E i , j + 1
定义 设以第i 个阵元为圆心的圆与被测件表面的切
次检测中, 第 i 个阵元施加的延时时间。 E i , j + 1
式为 [ 8 ] 点为 M i ( 见图 4 ), M i 的坐标( x M z M ) 可表示为
,
i i
·
1 x M = x C +d i sinα i ( 7 )
]
)
E i , j + 1 = [ max ( t i , j - t i , j +E i , j ( 2 ) i i
2 · ( 8 )
z M = d i cosα i
i
为保证延时法则中的最小延时为零, 需将延时
d i -d i + 1
α i = arcsin ( 9 )
时间按式( 3 ) 进一步处理。
x C x C
i + 1 i
E i , j + 1 =E i , j + 1 - minE i , j ( 3 ) 式中: α i 为第 i 个阵元的反射路径与 z 轴的夹角; C i
延时的目的是使得各阵元发射的声波同时到达 的横坐标。
为第i 个阵元的中心点; x C
i 为C i
被测件界面, 从而实现叠加声波的垂直入射。把式
( 3 ) 代入式( 2 ), 可得到延时时间的迭代表达式为
t i , j t i , j
E i , j + 1 =E i , j - - minE i , j - 2
2 ( 4 )
E i , 0 = 0
经过数次迭代后, 入射波的合成波将逐渐接近
平行于被测件表面, 此时声波近似垂直入射被测件 图 4 声波与试件表面的几何关系示意
表面。自适应迭代效果如图 3 所示, 图中线条为各 对于阵元总数 为 N 的 线 阵 探 头, 总 共 可 得 到
次迭代的叠加声波。迭代的原理为逐步补偿差值使 N-1 个切点。对切点进行拟合, 即可得到该试验
得叠加声波逐渐与试件界面形状一致。 对应的曲面形状。
1.5 全聚焦成像轮廓提取
全聚焦成像采用了全矩阵捕捉技术, 充分利用
了采集过程中的信息, 成像效果较好 [ 6 ] 。文章从全
聚焦成像中提取轮廓作为自适应测量迭代优化结果
的比较对象, 避免了与试件模型直接比较时存在的
加工误差和配准误差。
全聚焦成像的结果是以测量区域为大小的矩阵
数据, 由于扫查时探头位于试件的正上方, 所以矩阵
图 3 自适应迭代效果示意
数据的纵向对应超声的传播方向。提取全聚焦矩阵
1.4 脉冲回波仿形 数据中的列数据 x ( n )[ 见图 5 ( a )], 对其进行离散
相控阵超声探头同时激发所有阵元并使用全部 希尔伯特变换 [ 14 ] , 变换式为
的阵元接收超声信号, 每个阵元可获得一组 A 扫描
- ( n ) x ( n ) · h ( n )
x =
信号。每组信号通过界面检测, 可得到各阵元对应
0 ,
n 为偶数
n
的渡越时间。第i 个阵元距离被测件表面的距离 1- -1 ) ( 10 )
(
h ( n ) = = 2
可表示为 [ 8 ] n π , n 为奇数
d i πn
/
x
d i = ct i 2 ( 5 ) 式中: - ( n ) 为x ( n ) 的希尔伯特变换; h ( n ) 为希尔
) ( 6 )
t i =T i -2E i + max ( E i 伯特变换器; n 为离散信号的点。
为第 i 个阵元 [ 15 ]
x
式中: c 为超声在耦合剂中的声速; T i 对 - ( n ) 取模, 可得到信号的包络[ 见图5 ( b )] ,
为第 i 个阵元
测得的渡越时间; t i 为反射时间; E i 包络中最大值对应的位置为界面点。
的延时。 对全聚焦矩阵数据的每一列进行最大包络提
为 取, 可得到一组界面点, 进一步对界面点进行三次曲
以第i 个阵元的中心点C i 为圆心, 距离 d i
半径作圆。有以下假设及推论: ① 假设入射波垂直 线拟合, 即可提取出表面轮廓( 见图 6 红色虚线)。
于被测件表面, 此时被测件的表面轮廓曲线相切于
2 软件开发
上述的所有圆 [ 12 ] ; ② 假设相邻阵元的中心 距离远
小于被测件表面在对应反射点处的曲率半径, 则相 笔者结合 M2M公司的相控阵超声采集器控制
3
8
2021 年 第 43 卷 第 8 期
无损检测