
Page 56 - 无损检测2021年第三期
P. 56
凌张伟, 等:
工业管道可变径内检测机器人
展, 取得了大量的研究成果。管道检测机器人按运 直、 弯头及变径管段, 亦可以搭载各种检测模块对工
动方式可分为介质压差式、 轮式、 螺旋驱动式、 履带 业管道进行检测。
式、 蛇行式、 蠕动式、 多足爬行式等 [ 3-7 ] 。针对弯管、
1 变径结构设计
变径管、“ T ” 型管道等复杂情况下的检测机器人, 距
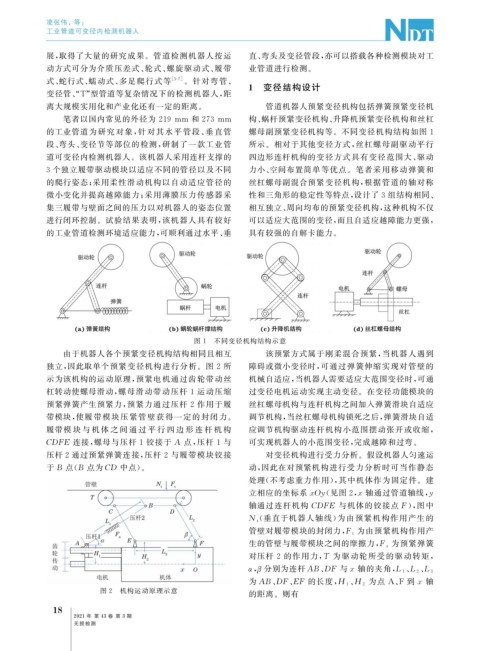
离大规模实用化和产业化还有一定的距离。 管道机器人预紧变径机构包括弹簧预紧变径机
笔者以国内常见的外径为 219mm 和 273mm 构、 蜗杆预紧变径机构、 升降机预紧变径机构和丝杠
的工业管道为研究对象, 针对其水平管 段、 垂直管 螺母副预紧变径机构等。不同变径机构结构如图 1
段、 弯头、 变径节等部位的检测, 研制了一款工业管 所示。相对于其他变径方式, 丝杠螺母副驱动平行
道可变径内检测机器人。该机器人采用连杆支撑的 四边形连杆机构的变径方式具有变径范围大、 驱动
3 个独立履带驱动模块以适应不同的管径以及不同 力小、 空间布置简单等优点。笔者采用移动弹簧和
的爬行姿态; 采用柔性滑动机构以自动适应管径的 丝杠螺母副混合预紧变径机构, 根据管道的轴对称
微小变化并提高越障能力; 采用薄膜压力传感器采 性和三角形的稳定性等特点, 设计了 3 组结构相同、
集三履带与壁面之间的压力以对机器人的姿态位置 相互独立、 周向均布的预紧变径机构, 这种机构不仅
进行闭环控制。试验结果表明, 该机器人具有较好 可以适应大范围的变径, 而且自适应越障能力更强,
的工业管道检测环境适应能力, 可顺利通过水平、 垂 具有较强的自解卡能力。
图 1 不同变径机构结构示意
由于机器人各个预紧变径机构结构相同且相互 该预紧方式属于刚柔混合预紧, 当机器人遇到
独立, 因此取单个预紧变径机构进行分析。图 2 所 障碍或微小变径时, 可通过弹簧伸缩实现对管壁的
示为该机构的运动原理, 预紧电机通过齿轮带动丝 机械自适应, 当机器人需要适应大范围变径时, 可通
杠转动使螺母滑动, 螺母滑动带动压杆 1 运动压缩 过变径电机运动实现主动变径。在变径功能模块的
预紧弹簧产生预紧力, 预紧力通过压杆 2 作用于履 丝杠螺母机构与连杆机构之间加入弹簧滑块自适应
带模块, 使履带模块压紧管壁获 得一定的封闭力。 调节机构, 当丝杠螺母机构锁死之后, 弹簧滑块自适
履带模 块 与 机 体 之 间 通 过 平 行 四 边 形 连 杆 机 构 应调节机构驱动连杆机构小范围摆动张开或收缩,
CDFE 连接, 螺母与压杆 1 铰接于 A 点, 压杆 1 与 可实现机器人的小范围变径, 完成越障和过弯。
压杆 2 通过预紧弹簧连接, 压杆 2 与履带模块铰接 对变径机构进行受力分析。假设机器人匀速运
于 B 点( B 点为CD 中点)。 动, 因此在对预紧机构进行受力分析时可当作静态
处理( 不考虑重力作用), 其中机体作为固定件。建
立相应的坐标系xO y 见图 2 , x 轴通过管道轴线,
y
(
轴通过连杆机构 CDFE 与机体的铰接点 F ), 图中
( 垂直于机器人轴线) 为由预紧机构作用产生的
N t
为由预紧机构作用产
管壁对履带模块的封闭力, F t
为预紧弹簧
生的管壁与履带模块之间的摩擦力, F s
对压杆 2 的作用力, T 为驱动轮所受的驱动转矩,
β 、 、
α , 分别为连杆AB 、 DF 与x 轴的夹角, L 1 L 2 L 3
、 为点 A 、 F 到 x 轴
为 AB 、 DF 、 EF 的长度, H 1 H 2
图 2 机构运动原理示意
的距离。则有
8
1
2021 年 第 43 卷 第 3 期
无损检测