
Page 135 - 无损检测2021年第三期
P. 135
李 衍:
全矩阵捕获和全聚焦法检测标准化新动态
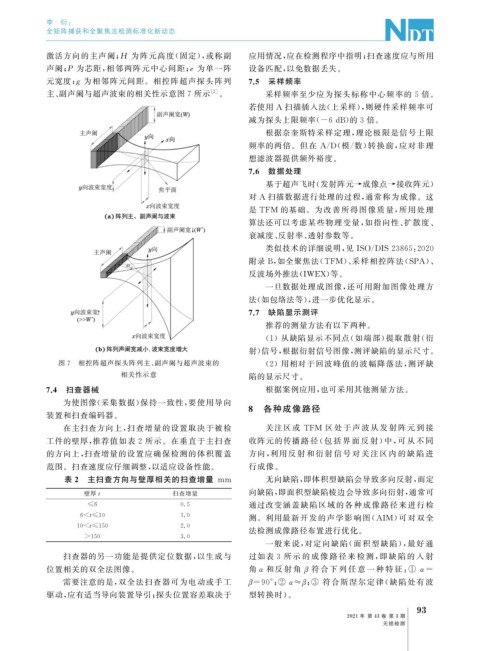
激活方向的主声阑; H 为阵元高度( 固定), 或称副 应用情况, 应在检测程序中指明; 扫查速度应与所用
声阑; P 为芯距, 相邻两阵元中心间距; e 为单一阵 设备匹配, 以免数据丢失。
元宽度; 为相邻阵元间距。相控阵超声探头阵列 7.5 采样频率
g
主、 副声阑与超声波束的相关性示意图 7 所示 [ 2 ] 。 采样频率至少应为探头标称中心频率的 5 倍。
若使用 A 扫描插入法( 上采样), 则硬件采样频率可
减为探头上限频率( -6dB ) 的 3 倍。
根据奈奎斯特采样定理, 理论极限是信号上限
频率的两倍。但在 A / D ( 模 / 数) 转换前, 应对非理
想滤波器提供额外裕度。
7.6 数据处理
基于超声飞时( 发射阵元 → 成像点 → 接收阵元)
对 A 扫描数据进行处理的过程, 通常称为成像。这
是 TFM 的基础。为改善所得图像质量, 所用处理
算法还可以考虑某些物理变量, 如指向性、 扩散度、
衰减度、 反射率、 透射参数等。
类似技术的详细说明, 见ISO / DIS23865 : 2020
附录 B , 如全聚焦法( TFM )、 采样相控阵法( SPA )、
反波场外推法( IWEX ) 等。
一旦数据处理成图像, 还可用附加图像处理方
法( 如包络法等), 进一步优化显示。
7.7 缺陷显示测评
推荐的测量方法有以下两种。
( 1 )从缺陷显示不同点( 如端部) 提取散射( 衍
射) 信号, 根据衍射信号图像, 测评缺陷的显示尺寸。
图 7 相控阵超声探头阵列主、 副声阑与超声波束的 ( 2 )用相对于回波峰值的波幅降落法, 测评缺
相关性示意 陷的显示尺寸。
7.4 扫查器械 根据案例应用, 也可采用其他测量方法。
为使图像( 采集数据) 保持一致性, 要使用导向
8 各种成像路径
装置和扫查编码器。
在主扫查方向上, 扫查增量的设置取决于被检 关注区 或 TFM 区 处 于 声 波 从 发 射 阵 元 到 接
工件的壁厚, 推荐值如表 2 所示。在垂直于主扫查 收阵元的传播路 径 ( 包 括 界 面 反 射) 中, 可 从 不 同
的方向上, 扫查增量的设置应确保检测的体积覆盖 方向, 利用 反 射 和 衍 射 信 号 对 关 注 区 内 的 缺 陷 进
范围。扫查速度应仔细调整, 以适应设备性能。 行成像。
表 2 主扫查方向与壁厚相关的扫查增量 mm 无向缺陷, 即体积型缺陷会导致多向反射, 而定
壁厚t 扫查增量 向缺陷, 即面积型缺陷棱边会导致多向衍射, 通常可
≤6 0.5 通过改变涵盖缺陷区域的各种成像路径来进行检
6<t≤10 1.0 测。利用最新开发的声学影响图 ( AIM ) 可对双全
10<t≤150 2.0
法检测成像路径布置进行优化。
>150 3.0
一般来说, 对定向缺陷( 面积型缺陷), 最好通
扫查器的另一功能是提供定位数据, 以生成与 过如表 3 所 示 的 成 像 路 径 来 检 测, 即 缺 陷 的 入 射
位置相关的双全法图像。 角α 和反 射 角 β 符 合 下 列 任 意 一 种 特 征: ① α=
需要注意的是, 双全法扫查器可为电动或手工 β =90° ; ②α≈ ; ③ 符合斯涅尔定律( 缺陷处有波
β
驱动, 应有适当导向装置导引; 探头位置容差取决于 型转换时)。
3
9
2021 年 第 43 卷 第 3 期
无损检测