
Page 100 - 无损检测2025年第四期
P. 100
鲍子阳,等:
基于直接视图的自适应多模式全聚焦成像方法
式中:为虚数单位。
j
由式(5)可知解析信号z(t)在复平面上的模和
角度分别代表原信号x(t)的瞬时幅值A(t)和瞬时相
位φ(t),即
()= ( ) = x
t
At z t () + ( ) (6)
t
x
2
2
h
xt
()
φ ( )=arctan h (7)
t
xt
()
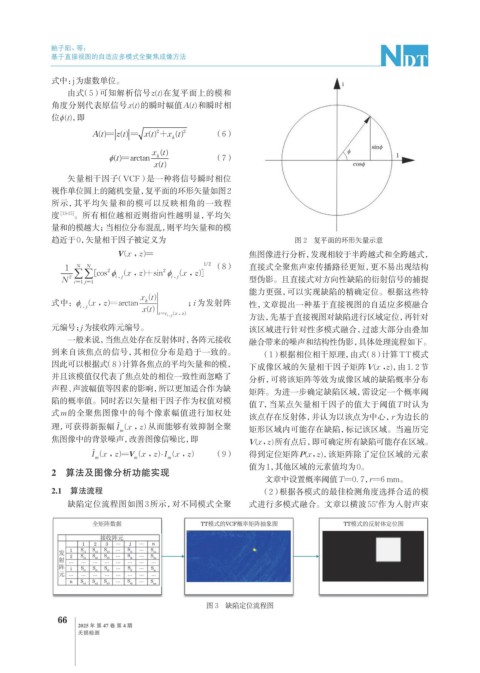
矢量相干因子(VCF)是一种将信号瞬时相位
视作单位圆上的随机变量,复平面的环形矢量如图2
所示,其平均矢量和的模可以反映相角的一致程
度 [13-15] 。所有相位越相近则指向性越明显,平均矢
量和的模越大;当相位分布混乱,则平均矢量和的模
趋近于0,矢量相干因子被定义为 图 2 复平面的环形矢量示意
焦图像进行分析,发现相较于半跨越式和全跨越式,
(8) 直接式全聚焦声束传播路径更短,更不易出现结构
型伪影。且直接式对方向性缺陷的衍射信号的捕捉
能力更强,可以实现缺陷的精确定位。根据这些特
式中: ;i为发射阵 性,文章提出一种基于直接视图的自适应多模融合
方法,先基于直接视图对缺陷进行区域定位,再针对
j
元编号;为接收阵元编号。 该区域进行针对性多模式融合,过滤大部分由叠加
一般来说,当焦点处存在反射体时,各阵元接收 融合带来的噪声和结构性伪影,具体处理流程如下。
到来自该焦点的信号,其相位分布是趋于一致的。 (1)根据相位相干原理,由式(8)计算TT模式
因此可以根据式(8)计算各焦点的平均矢量和的模, 下成像区域的矢量相干因子矩阵V(x,z),由1. 2节
并且该模值仅代表了焦点处的相位一致性而忽略了 分析,可将该矩阵等效为成像区域的缺陷概率分布
声程、声波幅值等因素的影响,所以更加适合作为缺
矩阵。为进一步确定缺陷区域,需设定一个概率阈
陷的概率值。同时若以矢量相干因子作为权值对模 值T,当某点矢量相干因子的值大于阈值T时认为
式m的全聚焦图像中的每个像素幅值进行加权处 该点存在反射体,并认为以该点为中心,r为边长的
理,可获得新振幅 从而能够有效抑制全聚 矩形区域内可能存在缺陷,标记该区域。当遍历完
焦图像中的背景噪声,改善图像信噪比,即 V(x,z)所有点后, 即可确定所有缺陷可能存在区域。
(9) 得到定位矩阵P(x,z),该矩阵除了定位区域的元素
值为1,其他区域的元素值均为0。
2 算法及图像分析功能实现
文章中设置概率阈值T=0. 7,r=6 mm。
2.1 算法流程 (2)根据各模式的最佳检测角度选择合适的模
缺陷定位流程图如图3所示,对不同模式全聚 式进行多模式融合。文章以横波55°作为入射声束
图 3 缺陷定位流程图
66
2025 年 第 47 卷 第 4 期
无损检测