
Page 58 - 无损检测2024年第十一期
P. 58
王 瑾,等:
基于磁场梯度感测的旧油管腐蚀缺陷脉冲涡流可视化检测
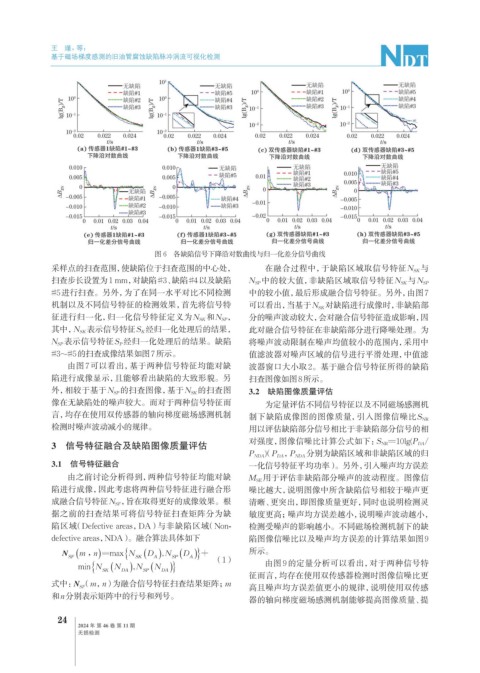
图 6 各缺陷信号下降沿对数曲线与归一化差分信号曲线
采样点的扫查范围,使缺陷位于扫查范围的中心处, 在融合过程中,于缺陷区域取信号特征N SK 与
扫查步长设置为1 mm,对缺陷#3、缺陷#4以及缺陷 N SP 中的较大值,非缺陷区域取信号特征N SK 与N SP
#5进行扫查。另外,为了在同一水平对比不同检测 中的较小值,最后形成融合信号特征。另外,由图7
机制以及不同信号特征的检测效果,首先将信号特 可以看出,当基于N SK 对缺陷进行成像时,非缺陷部
征进行归一化,归一化信号特征定义为N SK 和N SP , 分的噪声波动较大,会对融合信号特征造成影响,因
其中, N SK 表示信号特征S K 经归一化处理后的结果, 此对融合信号特征在非缺陷部分进行降噪处理。为
N SP 表示信号特征S P 经归一化处理后的结果。缺陷 将噪声波动限制在噪声均值较小的范围内,采用中
#3~#5的扫查成像结果如图7所示。 值滤波器对噪声区域的信号进行平滑处理,中值滤
由图7可以看出,基于两种信号特征均能对缺 波器窗口大小取2。基于融合信号特征所得的缺陷
陷进行成像显示,且能够看出缺陷的大致形貌。另 扫查图像如图8所示。
外,相较于基于N SP 的扫查图像,基于N SK 的扫查图 3.2 缺陷图像质量评估
像在无缺陷处的噪声较大。而对于两种信号特征而 为定量评估不同信号特征以及不同磁场感测机
言,均存在使用双传感器的轴向梯度磁场感测机制
制下缺陷成像图的图像质量,引入图像信噪比S NR
检测时噪声波动减小的规律。 用以评估缺陷部分信号相比于非缺陷部分信号的相
3 信号特征融合及缺陷图像质量评估 对强度,图像信噪比计算公式如下: S NR =10lg(P DA /
P NDA )(P DA , P NDA 分别为缺陷区域和非缺陷区域的归
3.1 信号特征融合 一化信号特征平均功率)。另外,引入噪声均方误差
由之前讨论分析得到,两种信号特征均能对缺 M SE 用于评估非缺陷部分噪声的波动程度。图像信
陷进行成像,因此考虑将两种信号特征进行融合形 噪比越大,说明图像中所含缺陷信号相较于噪声更
成融合信号特征N SF ,旨在取得更好的成像效果。根 清晰、更突出,即图像质量更好,同时也说明检测灵
据之前的扫查结果可将信号特征扫查矩阵分为缺 敏度更高;噪声均方误差越小,说明噪声波动越小,
陷区域(Defective areas,DA)与非缺陷区域(Non- 检测受噪声的影响越小。不同磁场检测机制下的缺
defective areas,NDA)。融合算法具体如下 陷图像信噪比以及噪声均方误差的计算结果如图9
所示。
(1)
由图 9 的定量分析可以看出,对于两种信号特
征而言,均存在使用双传感器检测时图像信噪比更
式中: N (m,n)为融合信号特征扫查结果矩阵;m 高且噪声均方误差值更小的规律,说明使用双传感
SF
和n分别表示矩阵中的行号和列号。 器的轴向梯度磁场感测机制能够提高图像质量、提
24
2024 年 第 46 卷 第 11 期
无损检测