
Page 116 - 无损检测2024年第九期
P. 116
程芳玲,等:
基于阈值和互相关的螺栓超声轴向应力测量算法
从图3中可看出,FIR滤波与巴特沃斯低通滤波 所需的初始渡越时间值t 和t ,但对不同应力状态
L0
T0
方法具有信号相位偏移的特点,不适用于高精度测 下超声横、纵波渡越时间值t 和t 的求取,阈值法
Lσ
Tσ
量;中值滤波会导致严重信号失真,波形发生变换; 的稳定性以及抗噪性能较差。同时互相关算法能够
相对的,小波降噪基于傅里叶变换理论,能避免相位 稳定准确地计算出施加应力后的横、纵波的声延时
偏移问题 [12] ,提供了高降噪精度,适合螺栓的超声渡 Δt 和Δt ,但不能找出所需的t 和t 。为了解决两
T L T0 L0
越时间测量。故,通过对比,选择小波降噪的方式进 种算法的固有缺陷,提出了一种能够结合两种算法
行降噪处理。 特点优势的计算方法——阈值互相关算法,并采用
2.2 阈值互相关算法思路 小波降噪法以提高计算精度,具体实施方案如图4
阈值算法能够方便地计算出超声横、纵波法中 所示。
得到 得到
阈值算法 t 和t
t 和t T σ Lσ
T0 L0
回波数据 互相关 结果分析
算法
小波降噪
算法
图 4 阈值互相关算法具体实施方案
其中小波降噪算法可以消除t 和t 的相对误 一体探头激发并接收超声纵波和横波信号,示波器
T0 L0
差,使得到的t 和t 更加接近真实值。再通过互相 进行保存数据后用Matlab进行数据处理。
T0
L0
关算法求得不同应力状态下与零应力状态下超声波 超声波信号发射接收器型号为5072PR(奥林巴
渡越时间值的差值Δt 和Δt ,将互相关算法求得的 斯公司生产),示波器为MD03034型示波器 (美国泰
L
T
Δt 和Δt 与阈值算法求得的t 和t 结合后准确算出 克公司生产),如图6所示。为减少多次耦合引起的
T L T0 L0
所需要的t 、t ,继而通过螺栓横纵波法测量公式计 测量误差,横纵波探头采用了多普勒公司定制的一
Lσ
Tσ
算出螺栓轴向应力。 体探头,可同时激发和接收横纵波,横纵波一体探头
和横波耦合剂如图7所示。
3 数据处理与结果分析
由于螺栓在实际受力过程中,一般应力的施
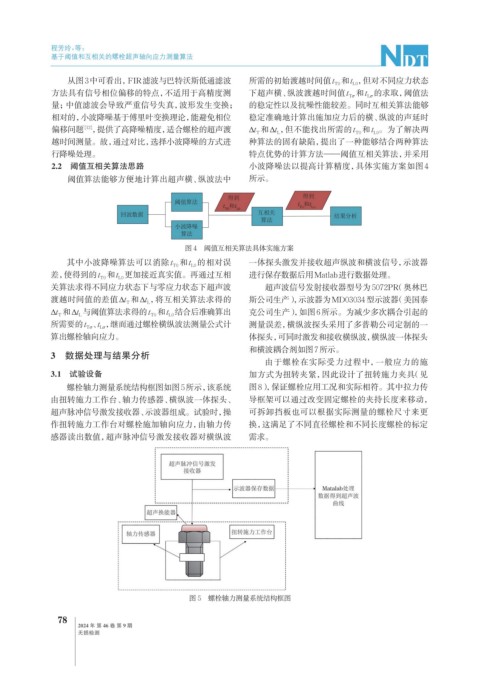
3.1 试验设备 加方式为扭转夹紧,因此设计了扭转施力夹具(见
螺栓轴力测量系统结构框图如图5所示,该系统 图8),保证螺栓应用工况和实际相符。其中拉力传
由扭转施力工作台、轴力传感器、横纵波一体探头、 导框架可以通过改变固定螺栓的夹持长度来移动,
超声脉冲信号激发接收器、示波器组成。试验时,操 可拆卸挡板也可以根据实际测量的螺栓尺寸来更
作扭转施力工作台对螺栓施加轴向应力,由轴力传 换,这满足了不同直径螺栓和不同长度螺栓的标定
感器读出数值,超声脉冲信号激发接收器对横纵波 需求。
图 5 螺栓轴力测量系统结构框图
78
2024 年 第 46 卷 第 9 期
无损检测