
Page 88 - 无损检测2024年第八期
P. 88
王 晨:
基于机器视觉的装配式建筑混凝土结构损伤检测
当
αβ
l ( , )-F i >Q (5)
1
则h(α,β)=l(α,β),即滤波后的图像在该点保持
原图像的灰度值。
就此完成采集图像的滤波处理,在处理中既保
留了混凝土图像的细节信息,也去除了较大的噪声。
1.3 基于Faster R-CNN的混凝土结构损伤检测
设计一种快速区域卷积神经网络(Faster R-
CNN)模型,实现混凝土结构损伤检测。设计的
Faster R-CNN模型由两部分组成:快速区域卷积神
经网络Fast R-CNN与区域推荐网络(RPN)。其中
RPN的任务是生成可能的推荐区域,Fast R-CNN
则负责在这些区域中检测目标 [13] 。在训练过程中,
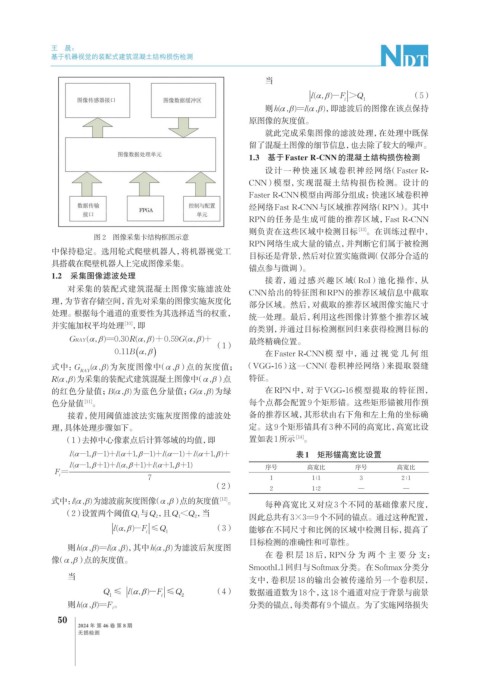
图 2 图像采集卡结构框图示意
RPN网络生成大量的锚点,并判断它们属于被检测
中保持稳定。选用轮式爬壁机器人,将机器视觉工
目标还是背景,然后对位置实施微调(仅部分合适的
具搭载在爬壁机器人上完成图像采集。
锚点参与微调)。
1.2 采集图像滤波处理
接着,通过感兴趣区域(RoI)池化操作,从
对采集的装配式建筑混凝土图像实施滤波处
CNN给出的特征图和RPN的推荐区域信息中截取
理,为节省存储空间,首先对采集的图像实施灰度化 部分区域。然后,对截取的推荐区域图像实施尺寸
处理。根据每个通道的重要性为其选择适当的权重,
统一处理。最后,利用这些图像计算整个推荐区域
并实施加权平均处理 [10] ,即
的类别,并通过目标检测框回归来获得检测目标的
R
G
G RAY ( αβ)=0.30 ( αβ)+0.59 ( αβ)+ 最终精确位置。
,
,
,
0.11B (αβ, ) (1) 在 Faster R-CNN 模型中,通过视觉几何组
式中:G RAY (α,β)为灰度图像中(α,β)点的灰度值; (VGG-16)这一CNN(卷积神经网络)来提取裂缝
R(α,β)为采集的装配式建筑混凝土图像中(α,β)点 特征。
的红色分量值;B(α,β)为蓝色分量值;G(α,β)为绿 在RPN中,对于VGG-16 模型提取的特征图,
色分量值 [11] 。 每个点都会配置9个矩形锚。这些矩形锚被用作预
接着,使用阈值滤波法实施灰度图像的滤波处 备的推荐区域,其形状由右下角和左上角的坐标确
理,具体处理步骤如下。 定。这9个矩形锚具有3种不同的高宽比,高宽比设
(1)去掉中心像素点后计算邻域的均值,即 置如表1所示 [14] 。
l
l
l ( -1, -1)+ ( +1, -1)+ ( -1)+ ( +1, )+ 表1 矩形锚高宽比设置
l
α
β
α
α
β
β
α
β
α
l
β
l ( -1, +1)+ ( , +1)+ ( +1, +1)
α
l
β
α
F i = 序号 高宽比 序号 高宽比
7 1 1∶1 3 2∶1
(2) 2 1∶2 — —
l
式中:(α,β)为滤波前灰度图像(α,β)点的灰度值 。
[12]
每种高宽比又对应3个不同的基础像素尺度,
(2)设置两个阈值Q 与Q ,且Q <Q ,当 因此总共有3×3=9个不同的锚点。通过这种配置,
2
1
1
2
( l αβ)-F ≤ Q (3) 能够在不同尺寸和比例的区域中检测目标,提高了
,
i
1
目标检测的准确性和可靠性。
则h(α,β)=l(α,β),其中h(α,β)为滤波后灰度图
在卷积层 18 后,RPN 分为两个主要分支:
像(α,β)点的灰度值。
SmoothL1回归与Softmax分类。在Softmax分类分
当 支中,卷积层18的输出会被传递给另一个卷积层,
(4) 数据通道数为18个,这18个通道对应于背景与前景
则h(α,β)=F 。 分类的锚点,每类都有9个锚点。为了实施网络损失
i
50
2024 年 第 46 卷 第 8 期
无损检测