
Page 59 - 无损检测2024年第三期
P. 59
汪家送, 等:
黏结滑移试验中的声发射评价方法
1 试验设计 2 声发射源定位
1.1 声发射检测系统 2.1 定位方法
声发射检测系统主要由传感器、 前置放大器、 多 传统的时差定位方法操作简便, 通过计算信号
通道声发射采集处理系统及计算机组成。 的到达时差, 再运用时差定位公式即可对声源进行
( 1 )传感器。选用声华科技公司研制的 SR15 定位。但是由于影响信号波形特征的因素较多, 波
高频谐振式传感器, 其频率为50~400kHz , 谐振频 的衰减及波形的畸变等现象无法避免, 因此该定位
率为150kHz , 灵敏度峰值不小于65dB 。 方法存在一定误差。而基于小波包分析互相关的定
( 2 )前置放大器。检测系统采用声华科技公司 位方法能有效地减小定位误差, 其基本的定位思想
研制的 PAV 宽带前置放大器, 增益为 40dB , 带宽 为: ① 利用正交小波对声发射源特征信号进行小波
为10kHz~2MHz , 具有自标定和低噪声等特点。 包分解后, 结合频谱分析结果所测得的衰减曲线对
( 3 )数据采集卡。采用 SWAVES全波形声发 信号进行补偿衰减处理, 然后实行小波包重构; ②
射数 据 采 集 卡, 其 最 高 采 样 速 率 为 20 MHz , 有 利用互相关定位技术对各个通道的重构信号进行相
12个通道。 关分析, 得出时间差, 然后用三维时差定位方法确定
1.2 试件制作 声发射源的位置 [ 3 ] 。
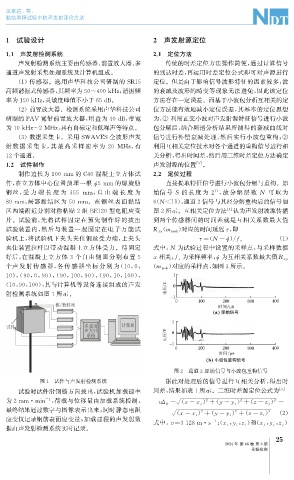
制作边长为 100mm 的 C40 混凝土立方体试 2.2 定位过程
件, 在立方体中心位置预埋一根 5mm 的螺旋肋 直接提取特征信号进行小波包分解与重构。原
ϕ
钢丝, 受 力 端 长 度 为 355 mm , 自 由 端 长 度 为 始信 号 S 的 长 度 为 2 , 故 分 解 层 数 N 可 取 为
11
80mm , 局部黏结区为 50mm 。在钢丝表面黏结 6 ( N<11 ), 通道2信号与其经分解重构后的信号如
区两端附近分别对称粘贴2组 BE120型电阻应变 图2所示。互相关定位方法 [ 4 ] 认为声发射波源传播
片。试验前, 先将试件固定在预先制作好的拔出 到两个传感器间的时间差就是互相关系数最大值
试验装置内, 然后与装置一起固定在电子万能试 ( ) 对应的时间延迟 τ , 即
R x y m p eak
(
)/
验机上, 将试验机下夹头夹住钢丝受力端, 上夹头 τ= N - ϕ f s ( 1 )
夹住装置拉杆以带动混凝土立方体受力。待固定 式中: N 为试验过程中设置的采样点, 与采样数据
ϕ
好后, 在混凝土立方体 3 个自由侧面分别布置 5
x 相关; 为采样频率; 为互相关系数最大值R x y
f s
个声 发 射 传 感 器, 各 传 感 器 坐 标 分 别 为 ( 10 , 0 , ( m p eak ) 对应的采样点, 如图3所示。
10 ),( 90 , 0 , 90 ),( 90 , 100 , 90 ),( 90 , 10 , 100 ),
( 10 , 90 , 100 ), 其与计算机等设备连接组成的声发
射检测系统如图1所示。
图2 通道2 原始信号与小波包重构信号
图1 试件与声发射检测系统 据此对处理后的信号进行互相关分析, 得出时
试验时试件沿钢筋方向拔出, 试验机加载速率 间差, 结果如表1所示。三维时差源定位公式为 [ 5 ]
为2mm · min , 荷载与位移量由加载系统控制, vΔ i j = ( x-x j ) + y-y j ) + z- z j ) -
(
(
-1
2
2
2
最终结果通过数字与图像表示出来; 同时静态电阻
(
(
2
2
2
( x-x i ) + y-y i ) + z- z i ) ( 2 )
应变仪记录钢筋表面应变量; 加载过程的声发射数
-1 , , )
, , ) 和( x j y j z j
式中: v=3128m · s ;( x i y i z i
据由声发射检测系统实时记录。
5
2
2024年 第46卷 第3期
无损检测