
Page 76 - 无损检测2023年第十二期
P. 76
康乐乐, 等:
发动机喷管钎焊缝射线检测的图像处理方法
出的边缘更加精确可靠, 具有较高的信噪比 [ 12 ] 。利
用 Cann y 算法, 可以对预处理后的射线图像进行边
缘信息提取, 与其他图像识别算法叠加, 能够更好地
实现缺陷的检出, Cann y 算法主要分为以下4步。
图7 Cann y 边缘检测算法流程图
图9 直角坐标系到霍夫空间的映射示意
( 1 )高斯滤波: 对图像进行平滑。
标系为霍夫空间。将直角坐标系下的3个位于同一
( 2 )梯度计算: 对滤波后的图像使用 Sobel算
直线上的点( 1 , 0 ),( 2 , 1 ) 以及( 3 , 2 ) 通过式( 9 ) 变换
[ 11 ]
到霍夫空间中( 对应3条曲线), 曲线会存在一个交
子来计算水平方向梯度G x 和竖直方向梯度G y 。
图像中每个像素点的梯度大小为
点。对霍夫空间进行网格划分, 通过投票制累计落
2 2 ( 7 )
G= G x +G y 在每个网格中的点的个数, 设置点数的阈值, 提取大
图像中每个像素点的梯度方向为 于阈值的格子所对应的θ 与 。针对提取的多组θ
ρ
G x 与 , 通过极坐标的反变换即可得出每个组合代表
ρ
G= arctan ( 8 )
G y 的直角坐标系下的直线。
( 3 )极大值抑制: 遍历每个图像像素, 判断该像 2.4 方法验证与分析
素的梯度值大小在其梯度方向上是否为邻域中的局
基于2.1~2.3节给出的图像处理方法和流程,
部最大值 [ 12 ] 。
开发了火箭发动机喷管钎焊缝缺陷自动处理软件,
并对实际射线检测图像进行处理, 验证了方法的有
( 4 )双阈值边缘检测:确定两个阈值G 1 与G 2
的像素点确认
效性, 以下为方法验证的典型示例。
( G 1> G 2 ), 遍历判断梯度值大于 G 1
的排除( d 点), 介于两
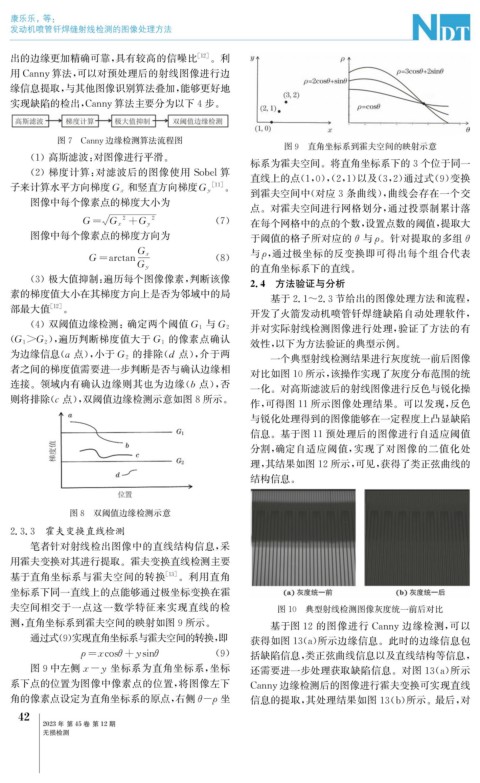
为边缘信息( a 点), 小于 G 2 一个典型射线检测结果进行灰度统一前后图像
者之间的梯度值需要进一步判断是否与确认边缘相
对比如图10所示, 该操作实现了灰度分布范围的统
连接。领域内有确认边缘则其也为边缘( b 点), 否
一化。对高斯滤波后的射线图像进行反色与锐化操
则将排除( c 点), 双阈值边缘检测示意如图8所示。 作, 可得图11所示图像处理结果。可以发现, 反色
与锐化处理得到的图像能够在一定程度上凸显缺陷
信息。基于图11预处理后的图像进行自适应阈值
分割, 确定自适应阈值, 实现了对图像的二值化处
理, 其结果如图12所示, 可见, 获得了类正弦曲线的
结构信息。
图8 双阈值边缘检测示意
2.3.3 霍夫变换直线检测
笔者针对射线检出图像中的直线结构信息, 采
用霍夫变换对其进行提取。霍夫变换直线检测主要
基于直角坐标系与霍夫空间的转换 [ 13 ] 。利用直角
坐标系下同一直线上的点能够通过极坐标变换在霍
夫空间相交于一点这一数学特征来实现直线的检 图10 典型射线检测图像灰度统一前后对比
测, 直角坐标系到霍夫空间的映射如图9所示。 基于图12 的图像进行 Cann y 边缘检测, 可以
通过式( 9 ) 实现直角坐标系与霍夫空间的转换, 即 获得如图13 ( a ) 所示边缘信息。此时的边缘信息包
ρ= xcosθ+y sinθ ( 9 ) 括缺陷信息, 类正弦曲线信息以及直线结构等信息,
图9中左侧x- y 坐标系为直角坐标系, 坐标 还需要进一步处理获取缺陷信息。对图13 ( a ) 所示
系下点的位置为图像中像素点的位置, 将图像左下 Cann y 边缘检测后的图像进行霍夫变换可实现直线
角的像素点设定为直角坐标系的原点, 右侧 θ- ρ 坐 信息的提取, 其处理结果如图13 ( b ) 所示。最后, 对
2
4
2023年 第45卷 第12期
无损检测