
Page 74 - 无损检测2023年第十二期
P. 74
康乐乐, 等:
发动机喷管钎焊缝射线检测的图像处理方法
2 基于边缘信息和结构特征提取分离的图
像处理方法
2.1 喷管射线检测图像处理总体方案
针对火箭发动机喷管钎焊缝射线检测图像的分
析和缺陷提取, 提出的检测图像处理流程图如图5所
示, 其主要包括3个步骤: ① 图像预处理: 对存在明
显灰度分布断层的图像, 利用亮度矩阵法实现对整张
图像灰度范围分布的统一, 然后通过高斯滤波实现图
像整体去噪, 再利用反色与锐化完成图像特征增强;
② 通过 Cann y 边缘检测、 霍夫变换、 自适应阈值分割
图2 喷管结构射线检测图像结构信息标识示意
实现图像直线结构与类正弦结构信息的提取; ③ 通
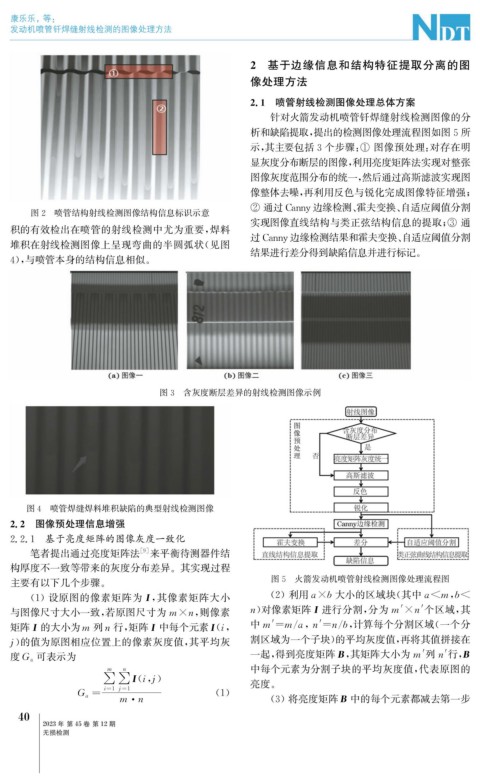
积的有效检出在喷管的射线检测中尤为重要, 焊料
过 Cann y 边缘检测结果和霍夫变换、 自适应阈值分割
堆积在射线检测图像上呈现弯曲的半圆弧状( 见图
结果进行差分得到缺陷信息并进行标记。
4 ), 与喷管本身的结构信息相似。
图3 含灰度断层差异的射线检测图像示例
图4 喷管焊缝焊料堆积缺陷的典型射线检测图像
2.2 图像预处理信息增强
2.2.1 基于亮度矩阵的图像灰度一致化
笔者提出通过亮度矩阵法 [ 9 ] 来平衡待测器件结
构厚度不一致等带来的灰度分布差异。其实现过程
图5 火箭发动机喷管射线检测图像处理流程图
主要有以下几个步骤。
( 1 )设原图的像素矩阵为I , 其像素矩阵大小 ( 2 )利用a×b 大小的区域块( 其中a<m , b<
与图像尺寸大小一致, 若原图尺寸为 m×n , 则像素 n ) 对像素矩阵I 进行分割, 分为 m'×n' 个区域, 其
中 m'=m / a , n'=n / b , 计算每个分割区域( 一个分
矩阵I 的大小为m 列 n 行, 矩阵I 中每个元素 I ( i ,
j ) 的值为原图相应位置上的像素灰度值, 其平均灰 割区域为一个子块) 的平均灰度值, 再将其值拼接在
可表示为 一起, 得到亮度矩阵B , 其矩阵大小为 m' 列n' 行, B
度G a
m n 中每个元素为分割子块的平均灰度值, 代表原图的
j
∑∑ I ( i ,) 亮度。
G a = i = 1j = 1 ( 1 )
m· n ( 3 ) 将亮度矩阵B 中的每个元素都减去第一步
0
4
2023年 第45卷 第12期
无损检测