
Page 75 - 无损检测2023年第十二期
P. 75
康乐乐, 等:
发动机喷管钎焊缝射线检测的图像处理方法
, 此时得 于灰度图像的灰度值分布中, 黑色像素值为0 , 白色
中计算得出的原像素矩阵I 的平均灰度G a
到原图的亮度差值矩阵 E 。列举矩阵 B 中某个元 像素值为255 , 所以对图像作反色处理是通过 255
素B ( i ,) 转换为矩阵E 中相应位置的元素E ( i ,) 减去图像中任一位置的像素值, 即I'=255-I 来实
j
j
只需将位于 i 行 j 列的元素B ( i ,) 减去平均灰度 现的。
j
, 即 其次, 对反色后的图像进行锐化增强。锐化的
值G a
j =
j -
E ( i ,) B ( i ,) G a ( 2 ) 本质是对图像进行微分运算处理 [ 11 ] , 能够增强灰度
式中: 0< i≤m , 0< j≤n 。 对比度且增强边缘信息, 笔者采用基于 La p lacian
( 4 )得到亮度差值矩阵E 后, 再通过双立方插 ( 拉普拉斯) 算子的二阶微分锐化。
值算法, 将矩阵 E 插值( Resize ) 成与原图尺寸一样 锐化像素计算可表示为
大小的亮度分布矩阵E' ( 大小为 m×n ); 双立方插 S ( x , ) I ( x , + y-1 ) I ( x-1 , )
y =
y+1 ) I ( x ,
+
y
值算法的公式计算涉及4×4尺寸即相邻16个像素 + I ( x+1 , ) 4 I ( x , ) ( 6 )
y -
y
点的值, 即 式中: I 为原图; I ( x , ) 为位于原图x 行 y 列的像
y
素点的像素值; S 为锐化后的图像; S ( x , ) 为锐化
2 2 y
j+ n ) ·
j =
E' ( i' , ' ) ∑ ∑ E ( i+m , 后图像中位于x 行
m= - 1 n= - 1 y 列的像素点的像素值。
R ( m -dx ) R ( d y- n ) ( 3 ) 2.3 结构信息提取及缺陷识别方法
式中:( i' , ' ) 为待计算像素点在原图中的包含小数 2.3.1 自适应阈值分割
j
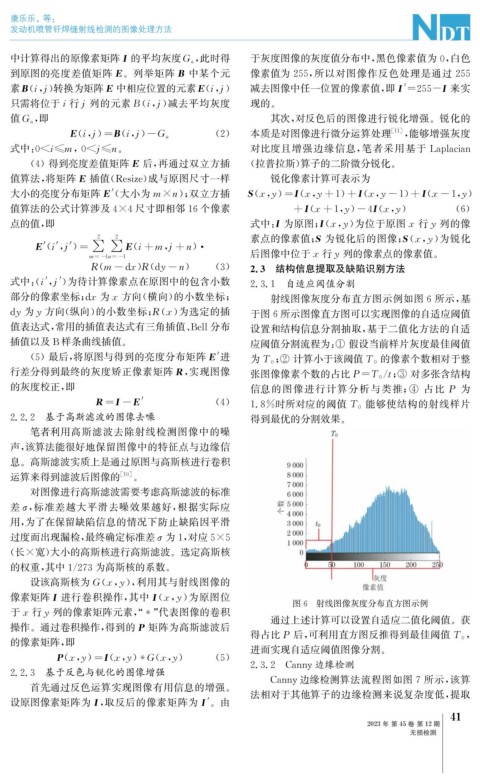
部分的像素坐标; d x 为x 方向( 横向) 的小数坐标; 射线图像灰度分布直方图示例如图6所示, 基
d y 为 y 方向( 纵向) 的小数坐标; R ( x ) 为选定的插 于图6所示图像直方图可以实现图像的自适应阈值
值表达式, 常用的插值表达式有三角插值、 Bell 分布 设置和结构信息分割抽取, 基于二值化方法的自适
插值以及 B样条曲线插值。 应阈值分割流程为: ① 假设当前样片灰度最佳阈值
( 5 )最后, 将原图与得到的亮度分布矩阵 E' 进 的像素个数相对于整
;
为T 0 ② 计算小于该阈值T 0
行差分得到最终的灰度矫正像素矩阵 R , 实现图像 张图像像素个数的占比P=T 0t ; ③ 对多张含结构
/
的灰度校正, 即 信息的图像进行计算分析与类推; ④ 占比 P 为
R= I-E' ( 4 ) 能够使结构的射线样片
1.8%时所对应的阈值 T 0
2.2.2 基于高斯滤波的图像去噪 得到最优的分割效果。
笔者利用高斯滤波去除射线检测图像中的噪
声, 该算法能很好地保留图像中的特征点与边缘信
息。高斯滤波实质上是通过原图与高斯核进行卷积
运算来得到滤波后图像的 [ 10 ] 。
对图像进行高斯滤波需要考虑高斯滤波的标准
差σ , 标准差越大平滑去噪效果越好, 根据实际应
用, 为了在保留缺陷信息的情况下防止缺陷因平滑
过度而出现漏检, 最终确定标准差 σ 为1 , 对应5×5
( 长×宽) 大小的高斯核进行高斯滤波。选定高斯核
的权重, 其中1 / 273为高斯核的系数。
设该高斯核为 G ( x , ), 利用其与射线图像的
y
像素矩阵I 进行卷积操作, 其中I ( x , ) 为原图位 图6 射线图像灰度分布直方图示例
y
于x 行 y 列的像素矩阵元素,“ * ” 代表图像的卷积
操作。通过卷积操作, 得到的P 矩阵为高斯滤波后 通过上述计算可以设置自适应二值化阈值。获
,
得占比P 后, 可利用直方图反推得到最佳阈值 T 0
的像素矩阵, 即
进而实现自适应阈值图像分割。
P ( x , ) I ( x , ) *G ( x , ) ( 5 ) 2.3.2 Cann y 边缘检测
y
y
y =
2.2.3 基于反色与锐化的图像增强
Cann y 边缘检测算法流程图如图 7 所示, 该算
首先通过反色运算实现图像有用信息的增强。
法相对于其他算子的边缘检测来说复杂度低, 提取
设原图像素矩阵为I , 取反后的像素矩阵为I' 。由
1
4
2023年 第45卷 第12期
无损检测