
Page 99 - 无损检测2023年第十期
P. 99
魏 军:
基于超声波反射法的油田注水井管柱腐蚀识别
时域两种 角 度 提 取 反 馈 回 波 信 号 特 征。频 域 特
征 [ 12 ] 与信号本身分量有关, 主要指信号在不同工况
下表征的频谱信息, 由信号振幅和信号相位组成。
希尔伯特黄变换可以有效提取反馈回波信号的频域
特征, 若信号为时间 - 频率上的一串离散序列, 那么
从频谱分析的角度, 筛选离散序列中最适合反映信
号分量的时间窗。希尔伯特黄变换可写为
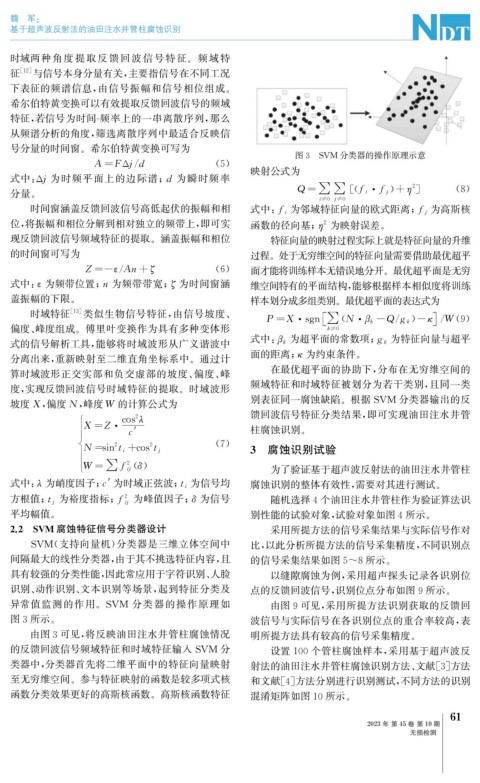
图3 SVM 分类器的操作原理示意
A = FΔ jd ( 5 ) 映射公式为
/
式中: Δ j 为时频平面上的边际谱; d 为瞬时频率
2
Q = ∑∑ f i f j + η ( 8 )
·
分量。
i ≠ 0j ≠ 0
时间窗涵盖反馈回波信号高低起伏的振幅和相 式中: 为邻域特征向量的欧式距离; 为高斯核
f j
f i
位, 将振幅和相位分解到相对独立的频带上, 即可实 函数的径向基; 为映射误差。
2
η
现反馈回波信号频域特征的提取。涵盖振幅和相位 特征向量的映射过程实际上就是特征向量的升维
的时间窗可写为 过程。处于无穷维空间的特征向量需要借助最优超平
Z=- ε / An+ ζ ( 6 ) 面才能将训练样本无错误地分开。最优超平面是无穷
式中: ε 为频带位置; n 为频带带宽; 为时间窗涵 维空间特有的平面结构, 能够根据样本相似度将训练
ζ
盖振幅的下限。 样本划分成多组类别。最优超平面的表达式为
时域特征 [ 13 ] 类似生物信号特征, 由信号坡度、
P =X· s g n ∑ N · β k -Q / - κ / W ( 9 )
g k
偏度、 峰度组成。傅里叶变换作为具有多种变体形 k≠ 0
式的信号解析工具, 能够将时域波形从广义谐波中 式中: 为超平面的常数项; 为特征向量与超平
g k
β k
分离出来, 重新映射至二维直角坐标系中。通过计 面的距离; κ 为约束条件。
算时域波形正交实部和负交虚部的坡度、 偏度、 峰 在最优超平面的协助下, 分布在无穷维空间的
频域特征和时域特征被划分为若干类别, 且同一类
度, 实现反馈回波信号时域特征的提取。时域波形
别表征同一腐蚀缺陷。根据 SVM 分类器输出的反
坡度 X , 偏度 N , 峰度 W 的计算公式为
馈回波信号特征分类结果, 即可实现油田注水井管
2
cosλ
X = Z·
c' 柱腐蚀识别。
2 2 ( 7 )
N = sint i+ cost j 3 腐蚀识别试验
2
W =
∑ f i j δ 为了验证基于超声波反射法的油田注水井管柱
为信号均
式中: λ 为峭度因子; c' 为时域正弦波; t i 腐蚀识别的整体有效性, 需要对其进行测试。
为裕度指标; 2 为峰值因子; δ 为信号 随机选择4个油田注水井管柱作为验证算法识
方根值; t j f i j
平均幅值。 别性能的试验对象, 试验对象如图4所示。
2.2 SVM 腐蚀特征信号分类器设计 采用所提方法的信号采集结果与实际信号作对
SVM ( 支持向量机) 分类器是三维立体空间中 比, 以此分析所提方法的信号采集精度, 不同识别点
间隔最大的线性分类器, 由于其不挑选特征内容, 且 的信号采集结果如图5~8所示。
具有较强的分类性能, 因此常应用于字符识别、 人脸 以缝隙腐蚀为例, 采用超声探头记录各识别位
识别、 动作识别、 文本识别等场景, 起到特征分类及 点的反馈回波信号, 识别位点分布如图9所示。
异常值监测的作用。 SVM 分类器的操作原理如 由图9可见, 采用所提方法识别获取的反馈回
图3所示。 波信号与实际信号在各识别位点的重合率较高, 表
由图3可见, 将反映油田注水井管柱腐蚀情况 明所提方法具有较高的信号采集精度。
的反馈回波信号频域特征和时域特征输入 SVM 分 设置100个管柱腐蚀样本, 采用基于超声波反
类器中, 分类器首先将二维平面中的特征向量映射 射法的油田注水井管柱腐蚀识别方法、 文献[ 3 ] 方法
至无穷维空间。参与特征映射的函数是较多项式核 和文献[ 4 ] 方法分别进行识别测试, 不同方法的识别
函数分类效果更好的高斯核函数。高斯核函数特征 混淆矩阵如图10所示。
1
6
2023年 第45卷 第10期
无损检测