
Page 95 - 无损检测2023年第十期
P. 95
吴玉龙, 等:
基于 YOLOV5算法的建筑外立面渗漏红外图像识别方法
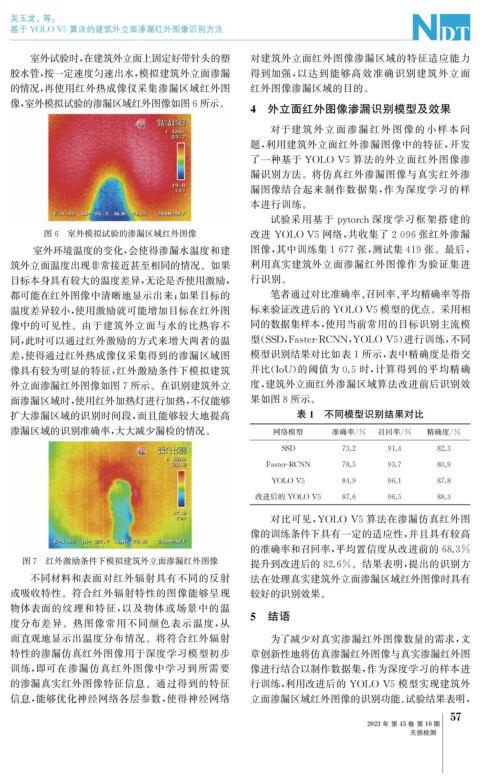
室外试验时, 在建筑外立面上固定好带针头的塑 对建筑外立面红外图像渗漏区域的特征适应能力
胶水管, 按一定速度匀速出水, 模拟建筑外立面渗漏 得到加强, 以达到能够高效准确识别建筑外立面
的情况, 再使用红外热成像仪采集渗漏区域红外图 红外图像渗漏区域的目的。
像, 室外模拟试验的渗漏区域红外图像如图6所示。
4 外立面红外图像渗漏识别模型及效果
对于建筑外立面渗漏红 外 图 像 的 小 样 本 问
题, 利用建筑外立面红外渗漏图像中的特征, 开发
了一种基于 YOLO V5 算法的外立面红外图像渗
漏识别方法。将仿真红外渗漏图像与真实红外渗
漏图像结合起来制作数据集, 作为深度学习的样
本进行训练。
试验采用基于 py torch 深度学习框架搭建的
图6 室外模拟试验的渗漏区域红外图像 改进 YOLOV5网络, 共收集了2096张红外渗漏
室外环境温度的变化, 会使得渗漏水温度和建 图像, 其中训练集1677张, 测试集419张。最后,
筑外立面温度出现非常接近甚至相同的情况。如果 利用真实建筑外立面渗漏红外图像作为验证集进
目标本身具有较大的温度差异, 无论是否使用激励, 行识别。
都可能在红外图像中清晰地显示出来; 如果目标的 笔者通过对比准确率、 召回率、 平均精确率等指
温度差异较小, 使用激励就可能增加目标在红外图 标来验证改进后的 YOLOV5模型的优点。采用相
像中的可见性。由于建筑外立面与水的比热容不 同的数据集样本, 使用当前常用的目标识别主流模
同, 此时可以通过红外激励的方式来增大两者的温 型( SSD , Faster-RCNN , YOLOV5 ) 进行训练, 不同
差, 使得通过红外热成像仪采集得到的渗漏区域图 模型识别结果对比如表1所示, 表中精确度是指交
像具有较为明显的特征, 红外激励条件下模拟建筑 并比( IoU ) 的阈值为 0.5 时, 计算得到的平均精确
外立面渗漏红外图像如图7所示。在识别建筑外立 度, 建筑外立面红外渗漏区域算法改进前后识别效
面渗漏区域时, 使用红外加热灯进行加热, 不仅能够 果如图8所示。
扩大渗漏区域的识别时间段, 而且能够较大地提高 表1 不同模型识别结果对比
渗漏区域的识别准确率, 大大减少漏检的情况。 网络模型 准确率 / % 召回率 / % 精确度 / %
SSD 73.2 91.4 82.3
Faster-RCNN 78.5 93.7 80.9
YOLOV5 84.9 96.1 87.8
改进后的 YOLOV5 87.6 96.5 88.3
对比可见, YOLO V5 算法在渗漏仿真红外图
像的训练条件下具有一定的适应性, 并且具有较高
的准确率和召回率, 平均置信度从改进前的68.3%
图7 红外激励条件下模拟建筑外立面渗漏红外图像 提升到改进后的82.6% 。结果表明, 提出的识别方
不同材料和表面对红外辐射具有不同的反射 法在处理真实建筑外立面渗漏区域红外图像时具有
或吸收特性。符合红外辐射特性的图像能够呈现 较好的识别效果。
物体表面的纹理和特征, 以及物体或场景中的温
度分布差异。热图像常用不同颜色表示温度, 从 5 结语
而直观地显示出温度分布情况。将符合红外辐射 为了减少对真实渗漏红外图像数量的需求, 文
特性的渗漏仿真红外图像用于深度学习模型初步 章创新性地将仿真渗漏红外图像与真实渗漏红外图
训练, 即可在渗漏仿真红外图像中学习到所需要 像进行结合以制作数据集, 作为深度学习的样本进
的渗漏真实红外图像特征信息。通过得到的特征 行训练, 利用改进后的 YOLO V5模型实现建筑外
信息, 能够优化神经网络各层参数, 使得神经网络 立面渗漏区域红外图像的识别功能。 试验结果表明,
7
5
2023年 第45卷 第10期
无损检测