
Page 57 - 无损检测2023年第三期
P. 57
刘 柯, 等:
钛合金锻坯的相控阵超声自动检测
保超声波声束能够有效地覆盖检测范围。自动化水 检测和射线检测的无损检测应用仿真软件 [ 9-10 ] , 其
浸相控阵线阵超声检测探头与传统水浸聚焦探头相 中 CIVA 超声模块使用基于近似理论的散射模型
同, 都是以一定厚度水层作为耦合介质, 通过发射与 进行缺陷仿真, 同时结合积分原理进行声波能量分
接收超声检测信号, 并且配合自动化机械扫查装置, 布分析, 可以根据不同检测工艺参数进行声场覆盖
最终进行 B 扫描或者 C 扫描成像的。水浸相控阵 仿真以及缺陷检测模拟。标准 AMS-STD-2154E
超声检测系统结构框图如图1所示 [ 7 ] 。相控阵超声 《 变形金属超声波检验程序》规定, 根据有效声束的
波在水 / 钛合金异种介质中传播时遵循 Snell 定律。 覆盖来确定扫查间距; 因此根据仿真的有效声束宽
当探头激发超声纵波在水中垂直向下传播, 声波按 度可以更好地规定扫查步进。
照 Snell定律发生折射, 最终与晶片激发产生的声 试验针对常用的 Ti6AL4V 锻坯, 主要的检测
波合成波阵面实现虚拟声束的偏转和聚焦 [ 8 ] 。 厚度为120 , 300mm 。使用的相控阵超声线阵检测
相控阵超声线阵检测使用的探头为线阵探头, 声 系统为 双 通 道 系 统, 其 中 通 道 1 的 检 测 频 率 为
束的形状为椭圆形, 可以电子调节声束的聚焦深度与 10MHz , 适用于检测深度较小的试件; 通道2的检
偏转角度。探头主要由主动窗“ A ” 与从动窗“ W ” 组 测频率为5MHz , 适用于检测深度较大的试件。针
成, 从动窗与主动窗的尺寸直接影响到缺陷的灵敏度 对常用检测规格制定超声仿真参数, 随着每组虚拟
与尺寸。改变聚焦法则可以调节主动窗宽度, 由于探 探头数的增加, 有效声束的宽度会变窄, 有效声束的
头宽度固定, 从动窗的宽度不可以控制或调节。 覆盖长度会缩短。
2.1 10MHz线阵探头仿真结果
通道1的10MHz探头的检测工艺参数需要具
备以下条件: ① 近表面盲区较小; ② 有效声束较
窄, 保证较高的分辨率与信噪比; ③ 有效声束长度
较大, 保证较大的检测深度覆盖范围。
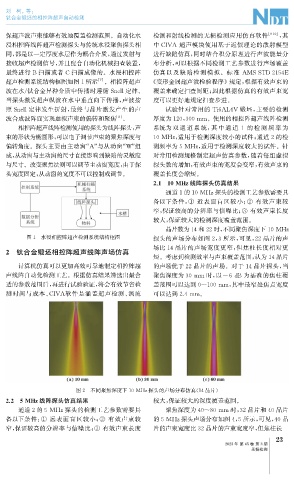
晶片数为14和22时, 不同聚焦深度下10MHz
图1 水浸相控阵超声检测系统结构框图 探头的声场分布如图2 , 3所示, 可见, 22 晶片的声
场比14晶片的声场宽度更窄, 但焦柱长度相对更
2 钛合金锻坯相控阵超声线阵声场仿真
短。考虑到检测效率与声束覆盖范围, 认为14晶片
计算机仿真可以更加高效可靠地制定相控阵超 的声场优于22晶片的声场。对于14晶片探头, 当
声线阵自动化检测工艺。根据仿真结果筛选出最合 聚焦深度为30mm 时, 以 -6dB 为基准的焦柱覆
适的参数范围后, 再进行试验验证, 将会有效节省检 盖范围可以达到0~100mm , 其中最窄处焦点宽度
测时间与成本。 CIVA软件是涵盖超声检测、 涡流 可以达到2.4mm 。
图2 不同聚焦深度下10MHz探头的声场分布仿真( 14晶片)
2.2 5MHz线阵探头仿真结果 较大, 保证较大的深度覆盖范围。
通道2的5MHz探头的检测工艺参数需要具 聚焦深度为40~80mm 时, 32晶片和40晶片
备以下条件: ① 远表面盲区较小; ② 有效声束较 的5MHz探头声场分布如图4 , 5所示, 可见, 40晶
窄, 保证较高的分辨率与信噪比; ③ 有效声束长度 片的声束宽度比32晶片的声束宽度窄, 但焦柱长
3
2
2023年 第45卷 第3期
无损检测