
Page 50 - 无损检测2023年第一期
P. 50
刘 洋, 等:
基于改进 YOLOV5的缺陷识别与定量分析
叠现象, 因此降低先验框数量也不会造成漏检, 故选
择新的先验框数量为 6 个, 其尺寸分别为 156×
269 , 103×151 , 72×97 , 56×78 , 38×40 , 21×24
( 单位均为像素)。
图2 改进的空间注意力模块
空间注意力模块压缩输入特征的维度, 将 W ×
H×C 的特征图变为 W ×H ×1 , 文章为保证特征
完整性, 在原全局平均池化的基础上增加全局最大
池化操作, 将得到的两个一维通道特征图拼接后, 利
用卷积核和 Si g moid函数得到空间域权重系数ω' ,
计算方法为
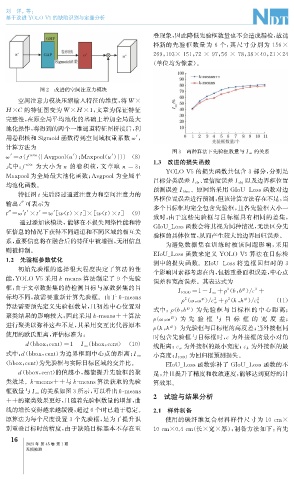
图3 两种算法下先验框数量与I ou 的关系
ω'= σ { n × n {[ Av gp ool ( u' ); Max p ool ( u' )]}} ( 8 ) 1.3 改进的损失函数
f
式中: n × n 为大小为n 的卷积核, 文章取 n =3 ; YOLO V5 的损失函数共包含 3 部分, 分别是
f
Max p ool 为全局最大池化函数; Av gp ool为全局平
目标分类误差I cls 、 置信度误差I ob j 以及边界框位置
均池化函数。
。原网络采用 GIoU _ Loss函数对边
特征图 t 先后经过通道注意力和空间注意力的 预测误差I bbox
界框位置误差进行预测, 但该计算方法存在不足, 当
输出 t″ 可表示为
多个目标框均完全包含先验框, 且各先验框大小一
×
×
t'″= ω't'× t'=w' [ w ( t ) t ] [ w ( t ) t ] ( 9 )
×
致时, 由于这些先验框与目标框具有相同的差集,
通过添加该模块, 能够在不损失网络性能和特 GIoU _ Loss函数会将其视为同种情况, 无法区分先
征信息的情况下获得不同通道和不同区域的相互关
验框的具体位置, 从而产生较大的边界回归误差。
系, 重要信息将在融合后的特征中被增强, 无用信息
为避免数据集在训练时被该问题影响, 采用
则被抑制。
EIoU _ Loss函数来定义 YOLO V5 算法在目标检
1.2 先验框参数优化
测中的损失函数。 EIoU _ Loss将边框回归时的 3
初始先验框的选择很大程度决定了算法的性 个影响因素都考虑在内, 包括重叠面积误差, 中心点
能, YOLOV5采用k-means算法制定了 9 个先验
误差和宽高误差。其表达式为
框, 由于文章数据集的待检测目标与原数据集的目
2
g t
2
I EIOU = 1- I ou+ ρ bb )/ c +
(,
标均不同, 故需要重新计算先验框。由于k-means 2 g t 2 2 g t 2
(
(
ρ ω , ω )/ c ω + ρ h , h )/ c h ( 11 )
算法需要预先定义先验框数量, 且初始中心位置对
g t
式中: ( b , b 为先验 框 与 目 标 框 的 中 心 距 离;
ρ
聚类结果的影响较大, 因此采用k-means++算法
g t
ρ ω , ω 为 先 验 框 与 目 标 框 的 宽 度 差;
(
进行聚类以弥补这些不足, 其采用交互比代替原本
ρ h , h 为先验框与目标框的高度差; 当外接框同
(
g t
使用的欧氏距离, 评估标准为: 时包含先验框与目标框时, c 为外接框的最小对角
=
d ( bbox , cent ) 1- I ou bbox , cent ) ( 10 ) 为外接框的最
(
线距离; c ω 为外接框的最小宽度; c h
式中: d ( bbox , cent ) 为边界框到中心点的距离; I ou 为回归框预测损失。
小高度; I EIOU
( bbox , cent ) 为先验框与实际目标区域的交并比。 EIoU _ Loss函数弥补了 GIoU _ Loss函数的不
d ( bbox , cent ) 的值越小, 越能提升先验框的聚 足, 并且提升了精度和收敛速度, 能够达到更好的计
类效果。 k-means++与k-means算法获取的先验 算效果。
的关系如图3所示, 可以看出 k-means
框数量与 I ou 2 试验与结果分析
++的聚类效果更好, 且随着先验框数量的增加, 曲
线的增长变得越来越缓慢, 超过6个时已趋于稳定。 2.1 样件制备
原算法为每个尺度设置3个先验框, 是为了提升识 使用的碳纤维复合材料样件尺寸为 10cm×
别重叠目标时的精度, 由于缺陷目标基本不存在重 10cm×0.4cm ( 长×宽×厚), 制备方法如下: 首先
1
6
2023年 第45卷 第1期
无损检测