
Page 105 - 无损检测2023年第一期
P. 105
赵 伟, 等:
WWER 堆型保护管组件外表面底部的目视检测
的要求。
( 6 )可达性分析。为了实现对底部处于水面以
下的保护管组件的检测, 要确保检查装置能到达水
面以下, 且检测要覆盖保护管组件。
( 7 )缺陷定量。采用测量系统对发现的保护管
组件外表面底部缺陷进行尺寸测量。测量系统的几
何测量精度符合标准 ПНАЭГ-7-016-89 的要求, 具
体如表1所示。
表1 测量系统允许的误差范围 mm
测量误差 测量误差
测量范围 测量范围
不能超过 不能超过
≤0.5 0.1 >2.5~4 0.5
>0.5~1 0.2 >4~6 0.6
>1.0~1.5 0.3 >6~10 0.8
>1.5~2.5 0.4 >10 1.0
3 目视检测的实施方案
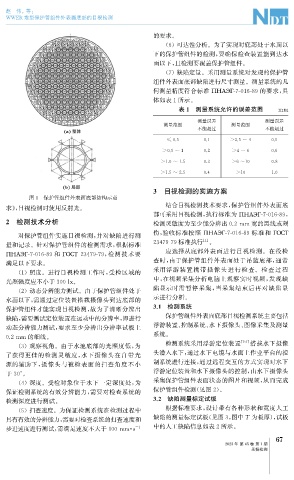
图1 保护管组件外表面底部结构示意
结合目视检测技术要求, 保护管组件外表面底
求》, 目视检测时使用反射光。
部可采用目视检测, 执行标准为 ПНАЭГ-7-016-89 ,
2 检测技术分析 检测灵敏度为至少能分辨出0.2mm 宽的黑线或刻
对保护管组件实施目视检测, 并对缺陷进行测 伤, 验收标准按照 ПНАЭГ-7-016-89 标准和 ГОСТ
量和记录。针对保护管组件的检测需求, 根据标准 23479-79标准执行 [ 1 ] 。
应选择从底部外表面进行目视检测。在役检
ПНАЭГ-7-016-89和 ГОСТ23479-79 , 检测技术要
查时, 由于保护管组件外表面处于吊篮底部, 通常
满足以下要求。
采用浮游装置携带摄像头进行检查。检查过程
( 1 )照度。进行目视检测工作时, 受检区域的
中, 在视频采集分析电脑上观察实时视频, 发现缺
光照强度应不小于300lx 。
( 2 )动态分辨能力测试。由于保护管组件处于 陷显示时需暂停采集, 当采集结束后再对缺陷显
水面以下, 需通过定位装置搭载摄像头到达底部的 示进行分析。
保护管组件才能实现目视检测, 故为了清晰分辨出 3.1 检测系统
缺陷, 需要测试定位装置在运动中的分辨率, 即进行 保护管组件外表面底部目视检测系统主要包括
动态分辨能力测试, 要求至少分辨出分辨率试板上 浮游装置、 控制系统、 水下摄像头、 图像采集及测量
系统。
0.2mm 的细线。
( 3 )观察视角。由于水池底部的光照度低, 为 检测系统采用浮游定位装置 [ 2-3 ] 搭载水下摄像
了获得更佳的检测灵敏度, 水下摄像头在自带光 头潜入水下, 通过水下电缆与水面上作业平台的控
源的辅助下, 摄像头与被检表面的扫查角度不小 制系统进行连接, 通过远程交互的方式实现对水下
浮游定位装置和水下摄像头的控制, 由水下摄像头
于30° 。
( 4 )深度。受检对象位于水下一定深度处, 为 采集保护管组件表面状态的图片和视频, 从而完成
保证检测系统的有效分辨能力, 需要对检查系统的 保护管组件检测( 见图2 )。
3.2 缺陷测量标定试板
检测深度进行测试。
( 5 )扫查速度。为保证检测系统在检测过程中 根据标准要求, 设计带有各种形状和宽度人工
具有有效的分辨能力, 需要对检查系统的扫查速度和 缺陷的测量标定试板( 见图3 , 图中T 为板厚), 试板
中的人工缺陷信息如表2所示。
-1
步进速度进行测试, 需满足速度不大于100mm · s
7
6
2023年 第45卷 第1期
无损检测