
Page 70 - 无损检测2022年第九期
P. 70
白贇沨,等:
基于 GF-WLS 和 VSM 的多能量 X 射线图像融合方法
目的是使得输出图像尽可能接近输入图像, 并且保 E ( x )
P C x ) = ( 12 )
(
持输入图像中显著区域外的其他部分平滑, 该算法 A n x )
(
∑ + η
的具体数学表达式为 n
式中: A n 为表示第n 个傅里叶分量的幅值; E ( x )
( ) ∂u 2 为局部能量函数; 为常数, 引入 的目的是为了应
2
+
p
∑ ( u p -g p ) λ a x , p g ∂x + η η
p
对所有傅里叶振幅都非常小的情况。
∂ u
( )
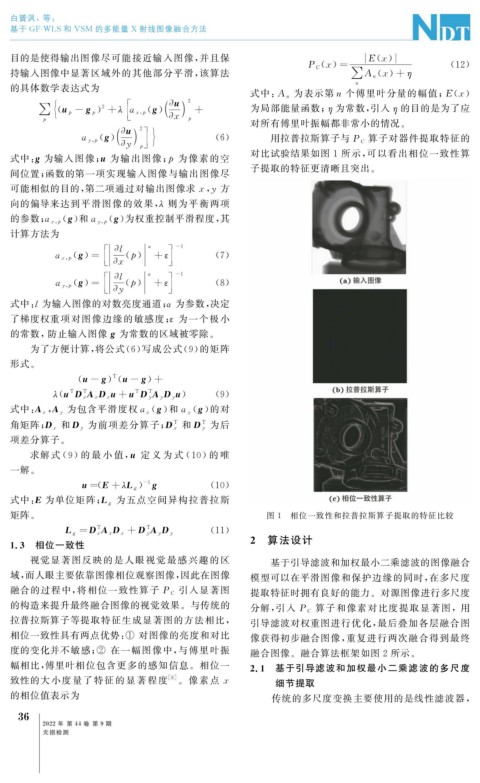
a y , p g 2 ( 6 ) 用拉普拉斯算子与 P C 算子对器件提取特征的
∂ y
p
式中: 为输入图像; u 为输出图像; 为像素的空 对比试验结果如图 1 所示, 可以看出相位一致性算
g
p
间位置; 函数的第一项实现输入图像与输出图像尽 子提取的特征更清晰且突出。
可能相似的目的, 第二项通过对输出图像求 x , 方
y
向的偏导来达到平滑图像的效果, λ 则为平衡两项
的参数; a x , p g 和a y , p g 为权重控制平滑程度, 其
( )
( )
计算方法为
( )
a x , p g = ∂l ( ) α + ε - 1 ( 7 )
p
∂x
( )
a y , p g = ∂ l ( ) α + ε - 1 ( 8 )
p
∂ y
式中: l 为输入图像的对数亮度通道; α 为参数, 决定
了梯度权重项对图像边缘的敏感度; ε 为一个极小
的常数, 防止输入图像 g 为常数的区域被零除。
为了方便计算, 将公式( 6 ) 写成公式( 9 ) 的矩阵
形式。
)
T
( u-g )( u-g +
λ ( u D x A x D x u+u D y A y D y u ) ( 9 )
T
T
T
T
, 为包含平滑度权a x g 和a y g 的对
( )
( )
式中: A x A y
T T 为后
角矩阵; D x 和D y 为前项差分算子; D x 和 D y
项差分算子。
求解 式 ( 9 ) 的 最 小 值, u 定 义 为 式 ( 10 ) 的 唯
一解。
( ) ( 10 )
- 1
u= E + λL g g
为五点空间异构拉普拉斯
式中: E 为单位矩阵; L g
矩阵。 图 1 相位一致性和拉普拉斯算子提取的特征比较
T T ( 11 )
L g =D x A x D x +D y A y D y
1.3 相位一致性 2 算法设计
视觉显著图反映的是人眼视觉最感兴 趣的区 基于引导滤波和加权最小二乘滤波的图像融合
域, 而人眼主要依靠图像相位观察图像, 因此在图像 模型可以在平滑图像和保护边缘的同时, 在多尺度
引入显著图
融合的过程中, 将相位一致性算子 P C 提取特征时拥有良好的能力。对源图像进行多尺度
的构造来提升最终融合图像的视觉效果。与传统的 算子和像素对比度提取显著图,用
分解, 引入 P C
拉普拉斯算子等提取特征生成显著图的方法相比, 引导滤波对权重图进行优化, 最后叠加各层融合图
相位一致性具有两点优势: ① 对图像的亮度和对比 像获得初步融合图像, 重复进行两次融合得到最终
度的变化并不敏感; ② 在一幅图像中, 与傅里叶振 融合图像。融合算法框架如图 2 所示。
幅相比, 傅里叶相位包含更多的感知信息。相位一 2.1 基于引导滤波和加权最小二乘滤波的多尺度
致性的大小度量了特征 的 显 著 程 度 [ 8 ] 。像 素 点 x 细节提取
的相位值表示为 传统的多尺度变换主要使用的是线性滤波器,
3
6
2022 年 第 44 卷 第 9 期
无损检测