
Page 71 - 无损检测2022年第三期
P. 71
向鹏宇, 等:
螺栓横向剪力的超声检测
克定律和固体声弹性效应 [ 8 ] 。在物体弹性变形范围
内, 由胡克定律可得
(
L σ =L 1 1+ σ / E ) ( 1 )
( 2 )
L 0 =L 1 +L 2
为螺
式中: σ 为轴向应力; E 为材料的弹性模量; L σ
为螺栓初始状态下
栓在外加应力 σ 下的总长度; L 0
的总长度; L 1 为螺栓发生弹性变形区间的长度; L 2
为螺栓未发生弹性变形区间的长度。
单头轴向螺栓在恒温且长度不变的条件下, 根
图 1 超声螺栓应力检测仪外观及工控机系统界面
据固体声弹性原理, 其声速和紧固件的受力大小呈
线性关系, 表达式为
(
v σ = v 0 1+A· σ ) ( 3 )
t 0 = 2L 0 v ( 4 )
/
为
式中: t 0 为螺栓初始状态下声波的渡越时间; v σ
为超声波在
超声波在外加应力 σ 下的传播速度; v 0
螺栓零应力下的传播速度; A 为声弹性系数。
由式( 1 ) ~ ( 4 ) 可得
(
(
L 1 E - 1 -A ) +L 0 1+A· σ )
t σ = t 0 ( 5 ) 图 2 超声换能器外观
(
L 0 1+A· σ )
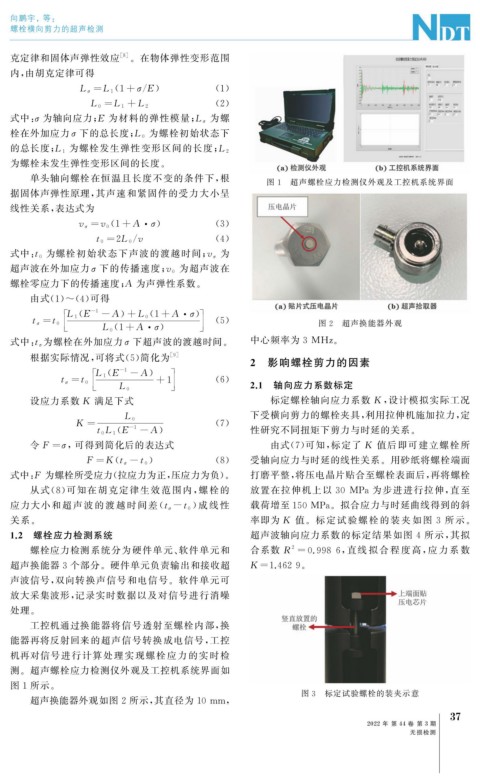
为螺栓在外加应力 σ 下超声波的渡越时间。 中心频率为 3MHz 。
式中: t σ
根据实际情况, 可将式( 5 ) 简化为 [ 9 ]
2 影响螺栓剪力的因素
(
L 1 E - 1 -A )
+1 ( 6 )
t σ = t 0 2.1 轴向应力系数标定
L 0
设应力系数 K 满足下式 标定螺栓轴向应力系数 K , 设计模拟实际工况
下受横向剪力的螺栓夹具, 利用拉伸机施加拉力, 定
L 0
K = ( 7 )
t 0 L 1 E - 1 -A ) 性研究不同扭矩下剪力与时延的关系。
(
令 F = σ , 可得到简化后的表达式 由式( 7 ) 可知, 标定了 K 值后即可建立螺栓所
) ( 8 ) 受轴向应力与时延的线性关系。用砂纸将螺栓端面
F =K ( t σ - t 0
式中: F 为螺栓所受应力( 拉应力为正, 压应力为负)。 打磨平整, 将压电晶片贴合至螺栓表面后, 再将螺栓
从式( 8 ) 可知在胡克定律生效范围内, 螺栓的 放置在拉伸机上以 30 MPa 为步进进行拉伸, 直至
) 成 线 性 载荷增至150MPa 。拟合应力与时延曲线得到的斜
应力大小和 超 声 波 的 渡 越 时 间 差( t σ -t 0
关系。 率即为 K 值。标定试验螺 栓 的 装 夹 如 图 3 所 示。
1.2 螺栓应力检测系统 超声波轴向应力系数的标定结果如图 4 所示, 其拟
螺栓应力检测系统分为硬件单元、 软件单元和 合系数 R =0.9986 , 直 线 拟 合 程 度 高, 应 力 系 数
2
超声换能器 3 个部分。硬件单元负责输出和接收超 K=1.4629 。
声波信号, 双向转换声信号和电信号。软件单元可
放大采集波形, 记录实时数据以及对信号进行消噪
处理。
工控机通过换能器将信号透射至螺栓内部, 换
能器再将反射回来的超声信号转换成电信号, 工控
机再对信号进行计算处理实现螺栓应力的 实时检
测。超声螺栓应力检测仪外观及工控机系统界面如
图 1 所示。
图 3 标定试验螺栓的装夹示意
超声换能器外观如图 2 所示, 其直径为 10mm ,
7
3
2022 年 第 44 卷 第 3 期
无损检测