
Page 71 - 无损检测2021年第七期
P. 71
李建华, 等:
基于 EDPF 算法的高空高压线故障智能识别
机选取其中 10 个区域的航拍图像( 每幅图像均最多
包含一个故障或未包含故障)。采用文中方法, 基于
高频测试信号注入的线路故障识别方法以及基于初
始行波相位差的线路故障识别方法进行故障识别研
究。所选区域实际故障情况如表 1 所示。
表 1 所选区域实际故障情况
区域编号 实际故障情况 区域编号 实际故障情况
1 无故障 6 无故障
2 断股故障 7 断股故障
3 断股故障 8 异物悬挂故障
无故障 异物悬挂故障
4 9
5 无故障 10 无故障
2.1 无人机航拍图像处理结果测试
2.1.1 图像恢复效果测试 图 1 无故障区域航拍图像边缘检测结果
高斯噪声及椒盐噪声下, 各识别方法图像恢复
如表 2 , 3 所示。
的信噪比 S NR 与峰值信噪比 P SNR
表 2 高斯噪声条件下各识别方法图像恢复的
信噪比与峰值信噪比 dB
方法种类 S NR P SNR
文中方法 12.55 30.31
基于高频测试信号注入的线路故障识别方法 11.08 26.31
基于改进方向电流法的线路故障识别方法 11.30 26.68
基于初始行波相位差的线路故障识别方法 11.32 28.65
表 3 椒盐噪声条件下各识别方法图像恢复的
信噪比与峰值信噪比 dB
方法种类 S NR P SNR
文中方法 18.74 36.69
基于高频测试信号注入的线路故障识别方法 9.38 27.66
基于改进方向电流法的线路故障识别方法 11.69 28.80
图 2 断股故障区域航拍图像边缘检测结果
基于初始行波相位差的线路故障识别方法 16.96 28.08
由表 2 可知, 在高斯噪声条件下, 文中方法恢复
图像 的 信 噪 比 与 峰 值 信 噪 比 分 别 为 12.55dB 和
30.31dB , 显著优于其他 3 种 识 别 方 法 的。由 表 3
可知, 在椒盐噪声条件下, 文中方法恢复图像的信噪
比与峰值信噪比分别为 18.74dB 和 36.69dB , 显著
优于其他 3 种识别方法的。综合表 2 和表 3 的试验
结果可知, 文中方法恢复无人机航拍图像方面相较
于其他 3 种识别方法具有明显优势, 且可实现高斯
噪声与椒盐噪声的消除。试验结果充分表明文中方
法的适应能力较强, 去噪声能力较好。
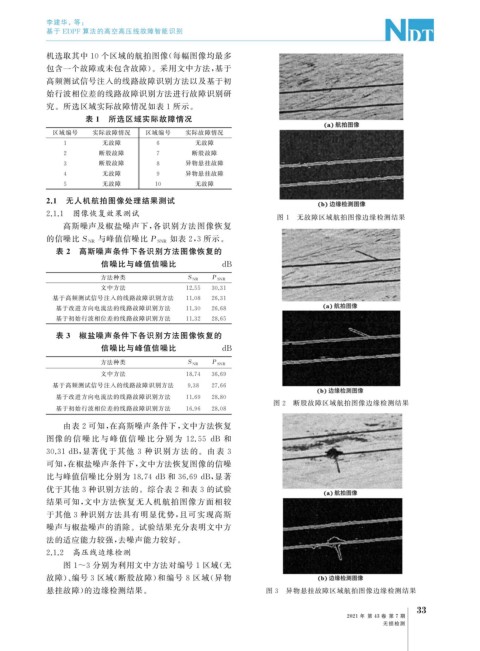
2.1.2 高压线边缘检测
图 1~3 分别为利用文中方法对编号 1 区域( 无
故障)、 编号 3 区域( 断股故障) 和编号 8 区域( 异物
悬挂故障) 的边缘检测结果。 图 3 异物悬挂故障区域航拍图像边缘检测结果
3
3
2021 年 第 43 卷 第 7 期
无损检测