
Page 55 - 无损检测2025年第三期
P. 55
王红源,等:
基于相控阵超声衍射波成像的球罐厚壁结构内部缺陷的定量检测
1.2 定位定量检测机理
相控阵超声衍射法定位定量原理示意如图4所
示[图中(x , y )为缺陷的上端衍射波坐标;(x , y )
U
L
U
L
为下端衍射波坐标]。反射波和入射波呈一定夹角,
探头极难接收到反射波,而衍射波的信号和方向性
较弱,探头在一定的位置范围内可接收到窄槽衍射
波。因此,为了去除缺陷反射波的干扰,可通过移动
探头位置(接收方向)避免接收反射波信号。
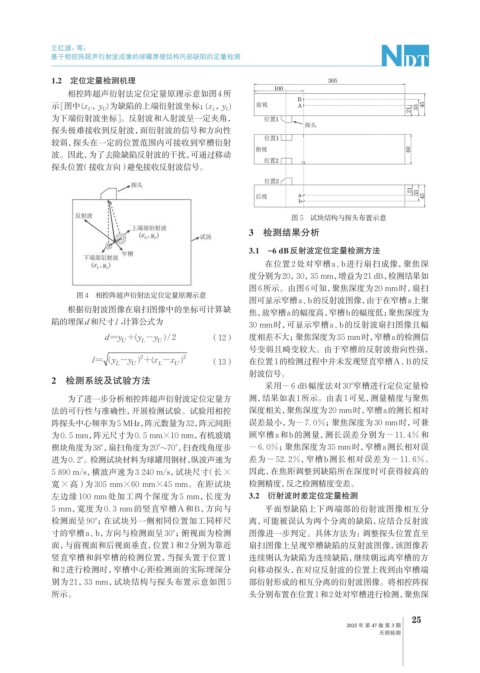
图 5 试块结构与探头布置示意
3 检测结果分析
3.1 -6 dB反射波定位定量检测方法
在位置 2 处对窄槽a、b进行扇扫成像,聚焦深
度分别为20,30,35 mm,增益为21 dB,检测结果如
图6所示。由图6可知,聚焦深度为20 mm时,扇扫
图 4 相控阵超声衍射法定位定量原理示意
图可显示窄槽a、b的反射波图像,由于在窄槽a上聚
根据衍射波图像在扇扫图像中的坐标可计算缺 焦,故窄槽a的幅度高,窄槽b的幅度低;聚焦深度为
陷的埋深d和尺寸l,计算公式为 30 mm时,可显示窄槽a、b的反射波扇扫图像且幅
d =y U +(y L -y U )/2 (12) 度相差不大;聚焦深度为35 mm时,窄槽a的检测信
号变弱且畸变较大。由于窄槽的反射波指向性强,
l = ( L -y y U 2 + ( ) L -x U ) x 2 (13) 在位置1的检测过程中并未发现竖直窄槽A、B的反
射波信号。
2 检测系统及试验方法
采用−6 dB幅度法对30°窄槽进行定位定量检
为了进一步分析相控阵超声衍射波定位定量方 测,结果如表1所示。由表1可见,测量精度与聚焦
法的可行性与准确性,开展检测试验。试验用相控 深度相关,聚焦深度为20 mm时,窄槽a的测长相对
阵探头中心频率为5 MHz,阵元数量为32,阵元间距 误差最小,为−7. 0%;聚焦深度为30 mm时,可兼
为0. 5 mm,阵元尺寸为0. 5 mm×10 mm,有机玻璃 顾窄槽a和b的测量,测长误差分别为− 11. 4%和
楔块角度为38°,扇扫角度为20°~70°,扫查线角度步 −6. 0%;聚焦深度为35 mm时,窄槽a测长相对误
进为0. 2°。检测试块材料为球罐用钢材,纵波声速为 差为− 52. 2%,窄槽b测长相对误差为− 11. 6%。
5 890 m/s,横波声速为3 240 m/s,试块尺寸(长× 因此,在焦距调整到缺陷所在深度时可获得较高的
宽 × 高)为 305 mm×60 mm×45 mm。在距试块 检测精度,反之检测精度变差。
左边缘 100 mm 处加工两个深度为 5 mm,长度为 3.2 衍射波时差定位定量检测
5 mm,宽度为 0. 3 mm 的竖直窄槽 A 和 B,方向与 平面型缺陷上下两端部的衍射波图像相互分
检测面呈 90°;在试块另一侧相同位置加工同样尺 离,可能被误认为两个分离的缺陷,应结合反射波
寸的窄槽a、b,方向与检测面呈30°;俯视面为检测 图像进一步判定。具体方法为:调整探头位置直至
面,与前视面和后视面垂直,位置1和2分别为靠近 扇扫图像上呈现窄槽缺陷的反射波图像,该图像若
竖直窄槽和斜窄槽的检测位置,当探头置于位置 1 连续则认为缺陷为连续缺陷,继续朝远离窄槽的方
和 2 进行检测时,窄槽中心距检测面的实际埋深分 向移动探头,在对应反射波的位置上找到由窄槽端
别为 21,33 mm,试块结构与探头布置示意如图 5 部衍射形成的相互分离的衍射波图像。将相控阵探
所示。 头分别布置在位置1和2处对窄槽进行检测,聚焦深
25
2025 年 第 47 卷 第 3 期
无损检测