
Page 64 - 无损检测2023年第十二期
P. 64
蔡彦强, 等:
相控阵超声虚拟探头的声压均匀性分析
现出一定的波动性。首先, 相较于单阵元, 组成虚拟 注意, 组成虚拟探头的阵元应尽量避开声场离散性
探头的两阵元所激发的声场会发生叠加, 增强了该 较大的阵元。除此之外, 虚拟探头的阵元数量也并
虚拟探头的声压, 且两阵元为相邻阵元, 其声场几乎 不是越多越好。
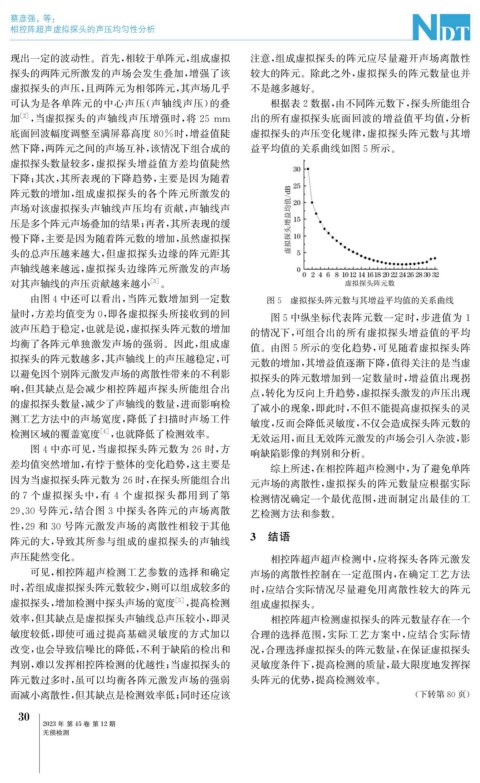
可认为是各单阵元的中心声压( 声轴线声压) 的叠 根据表2数据, 由不同阵元数下, 探头所能组合
加 [ 2 ] , 当虚拟探头的声轴线声压增强时, 将 25mm 出的所有虚拟探头底面回波的增益值平均值, 分析
底面回波幅度调整至满屏幕高度80%时, 增益值陡 虚拟探头的声压变化规律, 虚拟探头阵元数与其增
然下降, 两阵元之间的声场互补, 该情况下组合成的 益平均值的关系曲线如图5所示。
虚拟探头数量较多, 虚拟探头增益值方差均值陡然
下降; 其次, 其所表现的下降趋势, 主要是因为随着
阵元数的增加, 组成虚拟探头的各个阵元所激发的
声场对该虚拟探头声轴线声压均有贡献, 声轴线声
压是多个阵元声场叠加的结果; 再者, 其所表现的缓
慢下降, 主要是因为随着阵元数的增加, 虽然虚拟探
头的总声压越来越大, 但虚拟探头边缘的阵元距其
声轴线越来越远, 虚拟探头边缘阵元所激发的声场
对其声轴线的声压贡献越来越小 [ 3 ] 。
由图4中还可以看出, 当阵元数增加到一定数 图5 虚拟探头阵元数与其增益平均值的关系曲线
量时, 方差均值变为0 , 即各虚拟探头所接收到的回
图5中纵坐标代表阵元数一定时, 步进值为 1
波声压趋于稳定, 也就是说, 虚拟探头阵元数的增加 的情况下, 可组合出的所有虚拟探头增益值的平均
均衡了各阵元单独激发声场的强弱。因此, 组成虚 值。由图5所示的变化趋势, 可见随着虚拟探头阵
拟探头的阵元数越多, 其声轴线上的声压越稳定, 可 元数的增加, 其增益值逐渐下降, 值得关注的是当虚
以避免因个别阵元激发声场的离散性带来的不利影
拟探头的阵元数增加到一定数量时, 增益值出现拐
响, 但其缺点是会减少相控阵超声探头所能组合出 点, 转化为反向上升趋势, 虚拟探头激发的声压出现
的虚拟探头数量, 减少了声轴线的数量, 进而影响检 了减小的现象, 即此时, 不但不能提高虚拟探头的灵
测工艺方法中的声场宽度, 降低了扫描时声场工件
敏度, 反而会降低灵敏度, 不仅会造成探头阵元数的
检测区域的覆盖宽度 [ 4 ] , 也就降低了检测效率。
无效运用, 而且无效阵元激发的声场会引入杂波, 影
图4中亦可见, 当虚拟探头阵元数为26时, 方
响缺陷影像的判别和分析。
差均值突然增加, 有悖于整体的变化趋势, 这主要是 综上所述, 在相控阵超声检测中, 为了避免单阵
因为当虚拟探头阵元数为26时, 在探头所能组合出 元声场的离散性, 虚拟探头的阵元数量应根据实际
的7 个虚拟探头中, 有 4 个虚拟探头都用到了第 检测情况确定一个最优范围, 进而制定出最佳的工
29 、 30号阵元, 结合图 3 中探头各阵元的声场离散 艺检测方法和参数。
性, 29和 30 号阵元激发声场的离散性相较于其他
3 结语
阵元的大, 导致其所参与组成的虚拟探头的声轴线
声压陡然变化。 相控阵超声超声检测中, 应将探头各阵元激发
可见, 相控阵超声检测工艺参数的选择和确定 声场的离散性控制在一定范围内, 在确定工艺方法
时, 若组成虚拟探头阵元数较少, 则可以组成较多的 时, 应结合实际情况尽量避免用离散性较大的阵元
虚拟探头, 增加检测中探头声场的宽度 [ 5 ] , 提高检测 组成虚拟探头。
效率, 但其缺点是虚拟探头声轴线总声压较小, 即灵 相控阵超声检测虚拟探头的阵元数量存在一个
敏度较低, 即使可通过提高基础灵敏度的方式加以 合理的选择范围, 实际工艺方案中, 应结合实际情
改变, 也会导致信噪比的降低, 不利于缺陷的检出和 况, 合理选择虚拟探头的阵元数量, 在保证虚拟探头
判别, 难以发挥相控阵检测的优越性; 当虚拟探头的 灵敏度条件下, 提高检测的质量, 最大限度地发挥探
阵元数过多时, 虽可以均衡各阵元激发声场的强弱 头阵元的优势, 提高检测效率。
而减小离散性, 但其缺点是检测效率低; 同时还应该 ( 下转第80页)
0
3
2023年 第45卷 第12期
无损检测