
Page 58 - 无损检测2023年第十二期
P. 58
骆 琦, 等:
相控阵超声平面波全聚焦成像算法及其应用
图3 含楔块平面波到焦点的声时计算示意
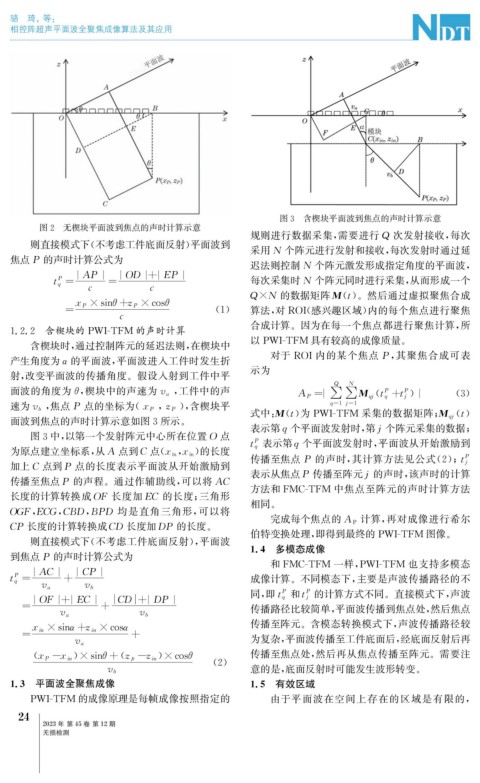
图2 无楔块平面波到焦点的声时计算示意
规则进行数据采集, 需要进行 Q 次发射接收, 每次
则直接模式下( 不考虑工件底面反射) 平面波到
采用 N 个阵元进行发射和接收, 每次发射时通过延
焦点P 的声时计算公式为
迟法则控制 N 个阵元激发形成指定角度的平面波,
| AP| | OD|+| EP|
P
t q = = 每次采集时 N 个阵元同时进行采集, 从而形成一个
c c
Q×N 的数据矩阵 M ( t )。然后通过虚拟聚焦合成
x P ×sinθ+ z P ×cosθ
= ( 1 ) 算法, 对 ROI ( 感兴趣区域) 内的每个焦点进行聚焦
c
1.2.2 含楔块的 PWI-TFM 的声时计算 合成计算。因为在每一个焦点都进行聚焦计算, 所
含楔块时, 通过控制阵元的延迟法则, 在楔块中 以 PWI-TFM 具有较高的成像质量。
对于 ROI内的某个焦点 P , 其聚焦合成可表
产生角度为α 的平面波, 平面波进入工件时发生折
示为
射, 改变平面波的传播角度。假设入射到工件中平
Q N
, 工件中的声 P P
)
(
面波的角度为θ , 楔块中的声速为v a A P =| ∑∑ M qj t q + t j | ( 3 )
, ), 含楔块平 q = 1j = 1
速为v b , 焦点 P 点的坐标为( x P z P
()
式中: M ( t ) 为 PWI-TFM 采集的数据矩阵; M qj t
面波到焦点的声时计算示意如图3所示。
表示第 q 个平面波发射时, 第 j 个阵元采集的数据;
图3中, 以第一个发射阵元中心所在位置 O 点
P 表示第 q 个平面波发射时, 平面波从开始激励到
, ) 的长度 t q
为原点建立坐标系, 从 A 点到C 点( x in x in
P
加上C 点到P 点的长度表示平面波从开始激励到 传播至焦点 P 的声时, 其计算方法见公式( 2 ); t j
表示从焦点P 传播至阵元 j 的声时, 该声时的计算
传播至焦点P 的声程。通过作辅助线, 可以将 AC
方法和 FMC-TFM 中焦点至阵元的声时计算方法
长度的计算转换成OF 长度加EC 的长度; 三角形
相同。
OGF , ECG , CBD , BPD 均是直角三角形, 可以将
计算, 再对成像进行希尔
完成每个焦点的 A P
CP 长度的计算转换成CD 长度加DP 的长度。
伯特变换处理, 即得到最终的 PWI-TFM 图像。
则直接模式下( 不考虑工件底面反射), 平面波
到焦点P 的声时计算公式为 1.4 多模态成像
和 FMC-TFM 一样, PWI-TFM 也支持多模态
P
t q = | AC| | CP| 成像计算。不同模态下, 主要是声波传播路径的不
+
v a v b
P P 的计算方式不同。直接模式下, 声波
同, 即 t q 和 t j
| OF|+| EC| CD +| DP|
= + 传播路径比较简单, 平面波传播到焦点处, 然后焦点
v a v b
传播至阵元。含模态转换模式下, 声波传播路径较
x in ×sinα+ z in ×cosα
= + 为复杂, 平面波传播至工件底面后, 经底面反射后再
v a
x P - x in ×sin θ+ z p - z in ×cos θ
传播至焦点处, 然后再从焦点传播至阵元。需要注
( 2 )
v b 意的是, 底面反射时可能发生波形转变。
1.3 平面波全聚焦成像 1.5 有效区域
PWI-TFM 的成像原理是每帧成像按照指定的 由于平面波在空间上存在的区域是有限的,
2
4
2023年 第45卷 第12期
无损检测