
Page 42 - 无损检测2023年第十一期
P. 42
张 林, 等:
基于聚类分析的旋转机械声发射碰摩定位算法
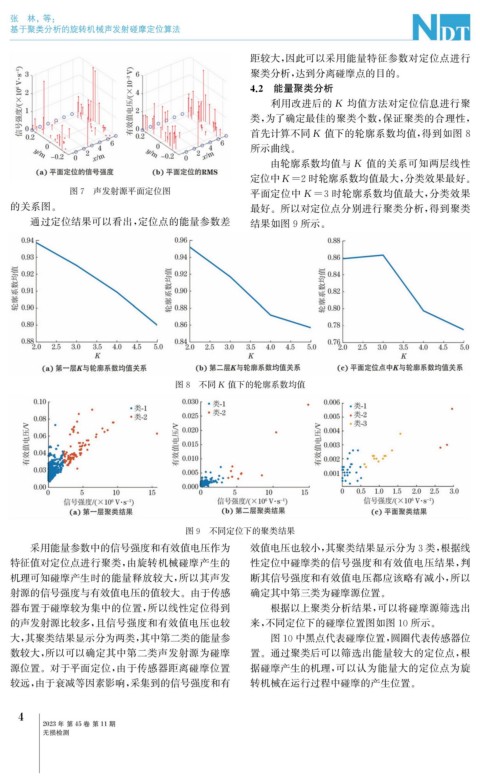
距较大, 因此可以采用能量特征参数对定位点进行
聚类分析, 达到分离碰摩点的目的。
4.2 能量聚类分析
利用改进后的 K 均值方法对定位信息进行聚
类, 为了确定最佳的聚类个数, 保证聚类的合理性,
首先计算不同 K 值下的轮廓系数均值, 得到如图8
所示曲线。
由轮廓系数均值与 K 值的关系可知两层线性
定位中K=2时轮廓系数均值最大, 分类效果最好。
图7 声发射源平面定位图 平面定位中 K=3时轮廓系数均值最大, 分类效果
的关系图。 最好。所以对定位点分别进行聚类分析, 得到聚类
通过定位结果可以看出, 定位点的能量参数差 结果如图9所示。
图8 不同 K 值下的轮廓系数均值
图9 不同定位下的聚类结果
采用能量参数中的信号强度和有效值电压作为 效值电压也较小, 其聚类结果显示分为3类, 根据线
特征值对定位点进行聚类, 由旋转机械碰摩产生的 性定位中碰摩类的信号强度和有效值电压结果, 判
机理可知碰摩产生时的能量释放较大, 所以其声发 断其信号强度和有效值电压都应该略有减小, 所以
射源的信号强度与有效值电压的值较大。由于传感 确定其中第三类为碰摩源位置。
器布置于碰摩较为集中的位置, 所以线性定位得到 根据以上聚类分析结果, 可以将碰摩源筛选出
的声发射源比较多, 且信号强度和有效值电压也较 来, 不同定位下的碰摩位置图如图10所示。
大, 其聚类结果显示分为两类, 其中第二类的能量参 图10中黑点代表碰摩位置, 圆圈代表传感器位
数较大, 所以可以确定其中第二类声发射源为碰摩 置。通过聚类后可以筛选出能量较大的定位点, 根
源位置。对于平面定位, 由于传感器距离碰摩位置 据碰摩产生的机理, 可以认为能量大的定位点为旋
较远, 由于衰减等因素影响, 采集到的信号强度和有 转机械在运行过程中碰摩的产生位置。
4
2023年 第45卷 第11期
无损检测