
Page 41 - 无损检测2023年第十一期
P. 41
张 林, 等:
基于聚类分析的旋转机械声发射碰摩定位算法
为确定声发射采集系统可正常使用, 需要进行声发
射检测系统的标定工作, 采用直径为0.3mm , 硬度
为2H 的铅笔进行断铅试验, 铅芯伸出3mm , 在距
离传感器50mm 处进行断铅, 取 3 次幅值的平均
值, 若平均值皆在3dB 范围内, 说明搭建的声发射
检测系统功能正常。
( 3 )声发射信号采集。确认声发射采集系统能
够正常工作后, 开始采集声发射信号, 采集系统的采
样频率设置为 1 MHz , 前置放大器的门槛设置为
40dB , 旋转机械开始运行。硬件连接完毕, 启动声发
射采集系统主机以及显示屏, 进行转子碰摩声发射信
号采集与保存。信号采集完毕后, 关闭采集设备。
图3 改进后的 K 均值聚类流程图 4 试验数据分析
样本 i 的轮廓系数可定义为
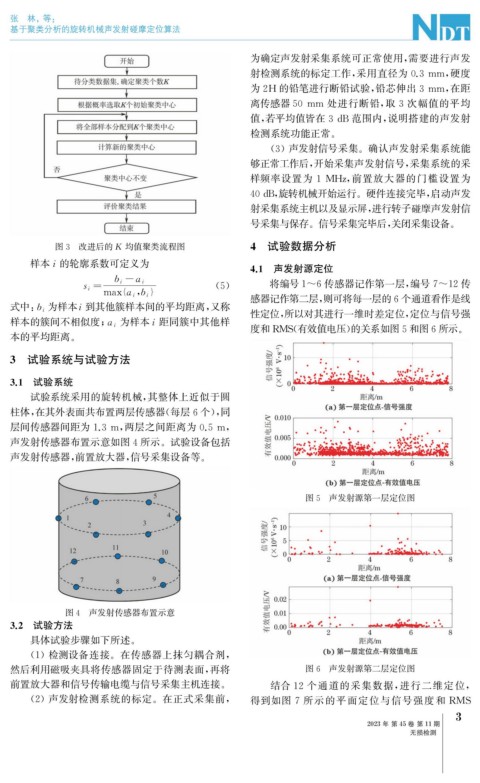
4.1 声发射源定位
b i- a i 将编号1~6传感器记作第一层, 编号7~12传
s i= ( 5 )
,
maxa i b i 感器记作第二层, 则可将每一层的6个通道看作是线
为样本 i到其他簇样本间的平均距离, 又称
式中: b i
性定位, 所以对其进行一维时差定位, 定位与信号强
为样本 i 距同簇中其他样
样本的簇间不相似度; a i
度和 RMS ( 有效值电压) 的关系如图5和图6所示。
本的平均距离。
3 试验系统与试验方法
3.1 试验系统
试验系统采用的旋转机械, 其整体上近似于圆
柱体, 在其外表面共布置两层传感器( 每层6个), 同
层间传感器间距为1.3m , 两层之间距离为0.5m ,
声发射传感器布置示意如图4所示。试验设备包括
声发射传感器, 前置放大器, 信号采集设备等。
图5 声发射源第一层定位图
图4 声发射传感器布置示意
3.2 试验方法
具体试验步骤如下所述。
( 1 )检测设备连接。在传感器上抹匀耦合剂,
然后利用磁吸夹具将传感器固定于待测表面, 再将 图6 声发射源第二层定位图
前置放大器和信号传输电缆与信号采集主机连接。 结合12 个通道的采集数据, 进行二维定位,
( 2 )声发射检测系统的标定。在正式采集前, 得到如图 7 所示的平面定位与信号强度和 RMS
3
2023年 第45卷 第11期
无损检测