
Page 40 - 无损检测2023年第十一期
P. 40
张 林, 等:
基于聚类分析的旋转机械声发射碰摩定位算法
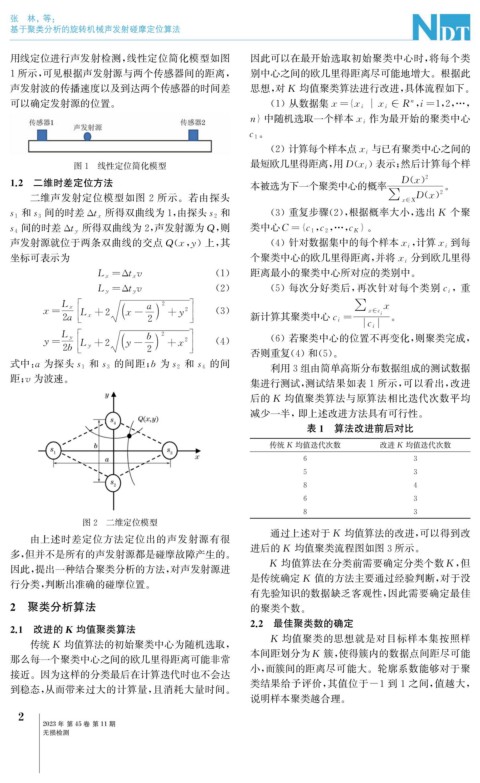
用线定位进行声发射检测, 线性定位简化模型如图 因此可以在最开始选取初始聚类中心时, 将每个类
1所示, 可见根据声发射源与两个传感器间的距离, 别中心之间的欧几里得距离尽可能地增大。根据此
声发射波的传播速度以及到达两个传感器的时间差 思想, 对 K 均值聚类算法进行改进, 具体流程如下。
{ ∣ x i ∈R , i= 1 , 2 ,…,
可以确定发射源的位置。 ( 1 )从数据集x= x i n
作为最开始的聚类中心
n } 中随机选取一个样本x i
。
c 1
与已有聚类中心之间的
( 2 ) 计算每个样本点x i
图1 线性定位简化模型 最短欧几里得距离, 用 D ( x i ) 表示; 然后计算每个样
2
1.2 二维时差定位方法 本被选为下一个聚类中心的概率 D ( x ) 。
2
二维声发射定位模型如图 2 所示。若由探头 ∑x∈ X D ( x )
和 ( 3 )重复步骤( 2 ), 根据概率大小, 选出 K 个聚
间的时差 Δt x 所得双曲线为1 , 由探头 s 2
和 s 3
s 1
所得双曲线为2 , 声发射源为 Q , 则 , ,…, c K 。
s 4 间的时差 Δt y 类中心C= c 1 c 2
声发射源就位于两条双曲线的交点 Q ( x , ) 上, 其 ( 4 )针对数据集中的每个样本x i , 计算x i 到每
y
坐标可表示为 个聚类中心的欧几里得距离, 并将x i 分到欧几里得
L x =Δt x v ( 1 ) 距离最小的聚类中心所对应的类别中。
L y =Δt y v ( 2 ) ( 5 )每次分好类后, 再次针对每个类别c i ,重
L x a 2 x
x= L x +2 +y 2 ( 3 ) ∑x∈ c i
x-
2a 2 新计算其聚类中心 c i= 。
c i
L y b 2 ( 6 )若聚类中心的位置不再变化, 则聚类完成,
y= L y +2 +x ( 4 )
y-
2b 2 2
否则重复( 4 ) 和( 5 )。
的间
式中: a 为探头 s 1 和s 3 的间距; b 为 s 2 和s 4 利用3组由简单高斯分布数据组成的测试数据
距; v 为波速。
集进行测试, 测试结果如表1所示, 可以看出, 改进
后的 K 均值聚类算法与原算法相比迭代次数平均
减少一半, 即上述改进方法具有可行性。
表1 算法改进前后对比
传统 K 均值迭代次数 改进 K 均值迭代次数
6 3
5 3
8 4
6 3
8 3
图2 二维定位模型
通过上述对于 K 均值算法的改进, 可以得到改
由上述时差定位方法定位出的声发射源有很
进后的 K 均值聚类流程图如图3所示。
多, 但并不是所有的声发射源都是碰摩故障产生的。
K 均值算法在分类前需要确定分类个数K , 但
因此, 提出一种结合聚类分析的方法, 对声发射源进
是传统确定 K 值的方法主要通过经验判断, 对于没
行分类, 判断出准确的碰摩位置。
有先验知识的数据缺乏客观性, 因此需要确定最佳
2 聚类分析算法 的聚类个数。
2.2 最佳聚类数的确定
2.1 改进的K 均值聚类算法
K 均值聚类的思想就是对目标样本集按照样
传统 K 均值算法的初始聚类中心为随机选取,
那么每一个聚类中心之间的欧几里得距离可能非常 本间距划分为K 簇, 使得簇内的数据点间距尽可能
小, 而簇间的距离尽可能大。轮廓系数能够对于聚
接近。因为这样的分类最后在计算迭代时也不会达
类结果给予评价, 其值位于-1到1之间, 值越大,
到稳态, 从而带来过大的计算量, 且消耗大量时间。
说明样本聚类越合理。
2
2023年 第45卷 第11期
无损检测