
Page 52 - 无损检测2023年第四期
P. 52
赵 敏, 等:
基于地磁异常成像的缺陷检测
轴巨磁阻作为其主要传感器 [ 9-10 ] , 但将弱磁检测应用 信号采样单元、 信号分析处理单元及显示模块等组
于钢板缺陷检测的相关研究较少。 成。系统中还包括标准样件, 标准样件中制作了不
为此笔者提出了一种基于异常地磁成像的钢板 同尺寸的人工缺陷, 用以验证检测系统的性能与相
缺陷检测方法, 将无损检测设备与机器人系统相结 关的技术指标。
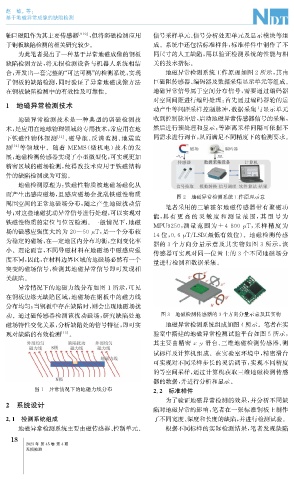
合, 开发出一套完整的“ 可达可测” 的检测系统, 实现 地磁异常检测系统工作原理如图2所示, 其由
了钢板的缺陷检测, 同时验证了异常地磁成像方法 巨磁阻传感器、 编码器及数据采集显示单元等组成。
在钢板缺陷检测中的有效性及可靠性。 地磁异常信号属于空间分布信号, 需要通过编码器
对空间间距进行编码处理: 首先通过编码器轮的运
1 地磁异常检测技术 动产生等间距采样控制脉冲, 数据采集与显示单元
地磁异常检测技术是一种典型的弱磁检测技 收到控制脉冲后, 启动地磁异常传感器信号的采集,
术, 是应用在地球物理领域的专用技术, 常应用在地 然后进行预处理和显示, 等距离采样间隔可依据不
下铁磁性物体探测 [ 11 ] 、 磁导航、 反潜监测、 地震监 同需求进行调节, 从而满足不同精度下的检测要求。
测 [ 12 ] 等领域中。随着 MEMS ( 微机电) 技术的发
展, 地磁检测传感器实现了小型微型化, 可实现更加
精密区域的磁场检测, 使得改技术应用于铁磁结构
件的缺陷检测成为可能。
地磁检测原理为: 铁磁性物质被地磁场磁化从
而产生出感应磁场, 且感应磁场会扰乱铁磁性物质 图2 地磁异常检测系统工作原理示意
周围空间的正常地磁场分布, 随之产生地磁扰动信
笔者采用的三轴霍尔地磁传感器带有聚磁功
号; 对这些地磁扰动异常信号进行处理, 可以实现对
能, 具 有 更 高 的 灵 敏 度 和 测 量 范 围, 其 型 号 为
铁磁性物质的定位与位置检测。一般情况下, 地磁
MPU9250 , 测量范围为 ±4800 μ T , 采样精度 为
场的磁感应强度大约为 20~50 μ T , 是一个分布较
14位, 0.6 μ T / LSB ( 最低有效位)。地磁检测传感
为稳定的磁场, 在一定地区内分布均衡, 空间变化率
器的3个方向分量示意及其实物如图 3 所示, 该
小。理论而言, 不同导磁材料在地磁场中磁感应强
传感器可实现对同一位置上的 3 个不同地磁场分
度不同, 因此, 在材料边界区域的地磁场必然有一个
量进行检测和数据采集。
突变的磁场信号, 检测其地磁异常信号即可发现相
关缺陷。
异常情况下的地磁力线分布如图1所示, 可见
在钢板边缘无缺陷区域, 地磁场在钢板中的磁力线
分布均匀; 当钢板中存在缺陷时, 则会出现地磁场扰
动。通过磁传感器检测该扰动磁场, 研究缺陷处地 图3 地磁检测传感器的3个方向分量示意及其实物
磁场特性变化关系, 分析缺陷处的信号特征, 即可实 地磁异常检测系统组成如图4所示。笔者在实
现对缺陷的有效检测 [ 13 ] 。 验室中搭建的地磁异常检测试验平台如图5所示,
其主要由精密x- y 滑台、 三维地磁检测传感器、 测
试标样及计算机组成。在实验室环境中, 精密滑台
可实现对不同采样步长的灵活调节, 实现不同精度
的等空间采样, 通过计算机获取三维地磁检测传感
器的数据, 并进行分析和显示。
图1 异常情况下的地磁力线分布 2.2 标准样件
为了验证地磁异常检测的效果, 并分析不同缺
2 系统设计
陷对地磁异常的影响, 笔者在一张标准钢板上制作
2.1 检测系统组成 了不同宽度、 深度和长度的缺陷, 并进行检测试验。
地磁异常检测系统主要由磁传感器、 控制单元、 根据不同标样的实际检测结果, 笔者发现缺陷
8
1
2023年 第45卷 第4期
无损检测