
Page 117 - 无损检测2023年第四期
P. 117
陈 斐, 等:
视频检测在 AP1000机组蒸汽发生器传热管防振条在役检查中的应用
于设备的承载能力, 检测时其相对防振条的倾斜角
度为α ; 经推导, 得到观察角度 β , 即
b×cosα× tanα
β= arctan ( 2 )
b×cosα-A × tanα
SG 防振条布局如图4所示, 每处 AVB 的两端
是检测时最不利于观察的位置, 通过式( 2 ) 计算得到
这两处的观察角度( 见表1 ), 可知1#~6#AVB 最
图6 86° 观察角度下分辨率测试结果
不利的观察角度均大于 30° , 满足规范要求; 7#~
12#AVB与1~6#AVB 完全对称, 因此其理论观
4 检测设备研制与检测工艺制定
察角度也一致。
4.1 技术路线
经过调研并结合技术要求, 笔者所在团队研制
了一套 SG 传热管 AVB专用视频检测设备, 其主要
检测方法如下。
首先连接摄像系统并校验其功能, 同时安装运
载系统。然后利用运载系统将摄像头通过 225° 检
查窗口运送至指定检测位置并加以固定, 待完成一
组 AVB 检测后, 再将其运送至下一个检测位置, 直
图4 SG 防振条布局示意 至完成225° 检查窗口处的全部检测工作。最后利
表1 AVB两处最不利位置的观察角度 用运载系统将摄像头通过45° 检查窗口运送至指定
检测位置并加以固定, 待完成一组 AVB 检测后, 再
AVB编号
观察位置
1# 2# 3# 4# 5# 6# 将其运送至下一个位置, 直至完成 45° 检查窗口处
① 51° 65° 74° 86° 73° 61° 的全部检测工作。
4.2 系统构成
② 51° 65° 74° 86° 73° 61°
视频检测设备由摄像系统和运载系统构成。摄像
AVB检测时, 摄像头距离防振条的距离为 f ,
经公式推导, 得到 系统具有满足技术要求的分辨率和相关功能, 运载系
统具备将摄像头运送至指定位置并加以固定的功能。
bcosα
f= ( 3 ) ( 1 )摄像系统
sin β
摄像系统具备多角度观察和缩放观察、 水平旋
代入数据计算得到检测过程的最大观察距离为
转和垂直俯仰功能, 并自带照明系统, 摄像头灯罩玻
1210mm 。
璃做了锐化处理以使光线更加柔和, 控制箱集成了
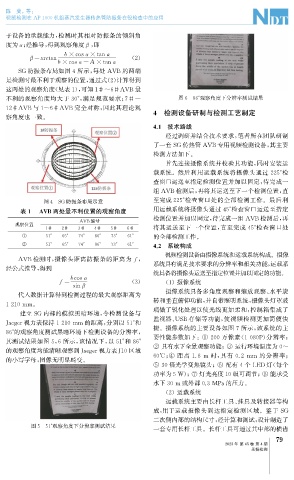
建立 SG 内部的模拟黑暗环境, 令检测设备与
监视器、 USB存储等功能, 使视频检测更加简便快
Jae g er视力表保持1210mm 的距离, 分别以51° 和
捷。摄像系统的主要设备如图7所示, 该系统的主
86° 的观察角度测试黑暗环境下检测设备的分辨率,
要性能参数如下: ① 200 万像素( 1080P ) 分辨率;
其测试结果如图 5 , 6 所示, 该情况下, 以 51° 和 86°
的观察角度均能清晰观察到Jae g er视力表J10区域 ② 具有水下全景观察功能; ③ 运行环境温度为0~
60℃ ; ④ 距离 1.8 m 时, 具有 0.2 mm 的分辨率;
的小写字母, 图像无明显畸变。
⑤30倍光学变焦镜头; ⑥ 配有4个 LED 灯( 每个
功率为5W ); ⑦ 灯光亮度10级可调节; ⑧ 能承受
水下30m 或外部0.3MPa的压力。
( 2 )运载系统
运载系统主要由长杆工具、 挂具及转接器等构
成, 用于运载摄像头到达指定检测区域。鉴于 SG
二次侧内部的结构尺寸, 经计算和测试, 设计制造了
图5 51° 观察角度下分辨率测试结果
一套专用长杆工具。长杆工具可通过其中部的横齿
9
7
2023年 第45卷 第4期
无损检测