
Page 72 - 无损检测2023年第二期
P. 72
纪象民, 等:
基于本征图像分解的焊缝提取算法
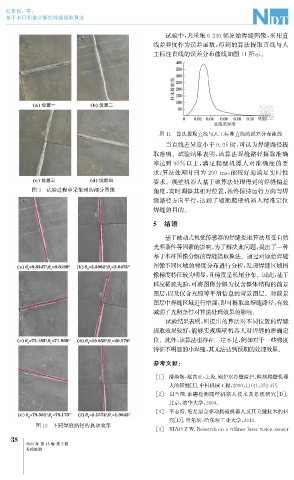
试验中, 共采集6240幅原始焊缝图像, 采用直
线差异度作为误差函数, 得到的算法提取直线与人
工标注直线的误差分布曲线如图11所示。
图11 算法提取直线与人工标准直线的误差分布曲线
当直线差异度小于0.05时, 可认为焊缝路径提
取准确。试验结果表明, 该算法焊缝路径提取准确
率达到90% 以上, 满足爬壁机器人对准确度的要
求; 算法处理时间为 200ms , 能较好地满足实时性
要求。爬壁机器人基于该算法处理得到的焊缝偏差
图9 试验过程中采集到的部分图像 角度, 实时调整其相对位置, 始终保持运行方向与焊
缝路径方向平行, 达到了辅助爬壁机器人精准定位
焊缝的目的。
5 结语
基于被动式视觉传感器的焊缝提取算法易受自然
光照条件等因素的影响, 为了解决此问题, 提出了一种
基于本征图像分解的焊缝提取算法。通过对原始焊缝
图像不同区域的梯度分布进行分析, 发现焊缝区域图
像梯度特征较为明显, 且梯度呈长尾分布。因此, 基于
梯度稀疏先验, 可将图像分解为仅含整体结构的前景
图层, 以及仅含光照等平滑信息的背景图层。对前景
图层中焊缝区域进行增强, 即可提取出焊缝路径, 有效
减弱了光照条件对算法处理效果的影响。
试验结果表明, 所提出的算法对不同位置的焊缝
提取效果较好, 能够实现爬壁机器人对焊缝的准确定
位。此外, 该算法也存在一定不足, 例如对于一些梯度
特征不明显的小焊缝, 其无法达到预期的处理效果。
参考文献:
[ 1 ] 潘焕焕, 赵言正, 王炎. 锅炉水冷壁清扫、 检测爬壁机器
人的研制[ J ] . 中国机械工程, 2000 , 11 ( 4 ): 372-375.
[ 2 ] 田兰图. 油罐检测爬壁机器人技术及系统研究[ D ] .
北京: 清华大学, 2004.
[ 3 ] 李志海. 轮足混合驱动爬壁机器人及其关键技术的研
究[ D ] . 哈尔滨: 哈尔滨工业大学, 2010.
图10 不同焊缝路径的提取效果
[ 4 ] XIAOZW.Researchonatrilineslaservisionsensor
8
3
2023年 第45卷 第2期
无损检测