
Page 47 - 无损检测2023年第二期
P. 47
程虎跃, 等:
一种多源特征融合深度学习模型及复杂构件缺陷类型识别方法
以利于质量判定。现有人工识别缺陷类型方式效率 了缺陷抽象特征( 全局), 缺乏有效利用缺陷的先验
低、 主观性强、 误判率高, 是制约当前复杂构件高效 特征( 局部), 而使得部分缺陷的类型识别效果不佳。
制造的瓶颈。因此, 研究复杂构件缺陷类型的射线 针对以上问题, 提出了一种多源特征融合深度
检测图像智能识别方法, 对提升缺陷检测能力及装 学习模型及复杂构件缺陷类型识别方法。首先, 通
备质量管控能力具有重要意义。 过构建先验特征( 几何特征与纹理特征), 并与传统
当前, 基于射线检测图像的缺陷类型识别方法 CNN 提取的特征进行融合, 提升了模型对缺陷全局
从发展历程上大致可以分为两个阶段: 传统缺陷类 特征及局部具体特征的综合提取能力; 其次, 为解决
型识别方法和基于深度学习的缺陷类型识别方 多类特征权重计算问题, 提出了考虑特征权重的
法 [ 2 ] 。传统缺陷类型识别方法 [ 3 ] 一般包括缺陷分 ReliefF-Poolin g 方法; 最后, 以某航天企业实际的复
割 [ 4 ] 、 缺陷特征提取与选择 [ 5 ] 、 缺陷类型识别 [ 6 ] 三个 杂构件缺陷为例对所提方法进行说明和验证。
步骤。传统方法是典型的“ 串联” 方式, 具有方法可 1 多源特征融合深度学习模型的缺陷类型
解释性强、 缺陷先验特征明确等优势, 但对各个步骤
识别方法
的准确性要求高, 方法的泛化能力差, 容易降低类型
识别的最终准确性。 1.1 综合先验特征融合与 ReliefF-Poolin g 的深度
近年来, 随着深度学习等理论的发展, 基于卷积 学习模型设计
神经网络( CNN ) 等人工智能的缺陷类型识别方法 提出的综合先验特征融合与 ReliefF-Poolin g
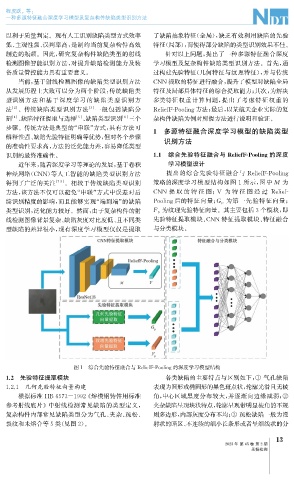
得到了广泛的关注 [ 7-9 ] 。相较于传统缺陷类型识别 策略的深度学习模型结构如图 1 所示, 图中 M 为
方法, 该方法不仅可以避免“ 串联” 方式中误差对后 CNN 提 取 的 特 征 图; V 为 特 征 图 经 过 Relief-
续识别精度的影响, 而且能够实现“ 端到端” 的缺陷 Poolin g 后的特征向量; G p 为第一先验特征向量;
类型识别, 泛化能力较好。然而, 由于复杂构件的射 F p 为纹理先验特征向量。其主要包括3个模块, 即
线检测图像背景复杂、 缺陷灰度对比度低、 且不同类 先验特征提取模块、 CNN 特征提取模块、 特征融合
型缺陷的差异很小, 现有深度学习模型仅仅是提取 与分类模块。
图1 综合先验特征融合与 ReliefF-Poolin g 的深度学习模型结构
1.2 先验特征提取模块 各类缺陷的主要特点与区别如下: ① 气孔缺陷
1.2.1 几何先验特征向量构建 表现为圆形或椭圆形的黑色斑点状, 轮廓光滑且无棱
根据标准 HB6573-1992 《 熔模钢铸件用标准 角, 中心区域黑度分布较大, 并逐渐向边缘减弱; ②
参考射线底片》中射线检测常见缺陷的类型定义, 夹杂缺陷呈现块状特点, 轮廓呈现带明显棱角的不规
复杂构件内部常见缺陷类型分为气孔、 夹杂、 疏松、 则多边形, 内部灰度分布不均; ③ 疏松缺陷一般为漫
裂纹和未熔合等5类( 见图2 )。 射状的暗区、 不连续的细小长条形或者呈细线状的分
3
1
2023年 第45卷 第2期
无损检测