
Page 37 - 无损检测2022年第十一期
P. 37
刘伯承, 等:
轴承滚子微细裂纹的漏磁检测
度稳定性, 同时检测灵敏度更高。基于以上问题,
选择 TMR 传感器拾取信号, 结合仿真得到的背景
磁场磁感 应 强 度, 提 出 了 基 于 测 点 区 域 近 零 磁 场
调控的 TMR 测磁方法。
对不同规格或不同工况的轴承滚子进行检测
时, 需要施加不同强度的磁化场, 改变检测探头所处
的背景磁场强度。因此, 设计了线圈电磁磁化的偏
置检测探头, 建立基于线圈磁化回路的自适应测点
图 5 无裂纹处背景磁场强度随电流强度的变化曲线
近零磁场环境。基于线圈偏置的 TMR 传感器检测
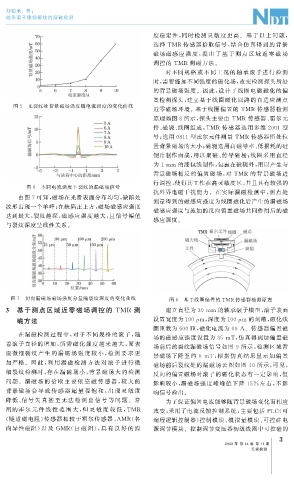
原理如图 8 所示, 探头主要由 TMR 传感器、 霍尔元
件、 磁轭、 线圈组成, TMR 传感器选用多维 2001 型
号; 选用 0811 型霍尔元件测量 TMR 传感器所处位
置背景磁场的大小; 磁轭选用高磁导率、 低损耗的硅
钢片制作而成, 用以聚磁、 传导磁场; 线圈采用直径
为 1mm 的漆包线制作, 包裹在磁轭外, 用以产生与
背景磁场相反的偏置磁场, 对 TMR 的背景磁场进
行调控, 使得其工作在高灵敏度区, 并且具有较强的
图 6 不同电流强度下裂纹的漏磁场信号
抗外界电磁干扰能力。在实际漏磁检测中, 测点处
由图 7 可知, 磁场在光滑表面分布均匀, 缺陷处
测量得到的磁感应强度为线圈磁化后产生的漏磁场
波形出现一个单峰; 在缺陷正上方, 磁场磁感应强度
磁感应强度与施加的反向偏置磁场共同作用后的磁
达到最大, 裂纹越深, 磁感应强度越大, 且信号幅值
感应强度。
与裂纹深度呈线性关系。
图 7 切向漏磁场磁场强度分量随裂纹深度的变化曲线 图 8 基于线圈偏置的 TMR 传感器检测原理
3 基于测点区域近零磁场调控的 TMR 测 建立直径为 30mm 的轴承滚子模型, 滚子表面
磁方法 设置宽度为100 μ m , 深度为100 μ m 的刻槽, 磁化线
圈匝数为 600 匝, 磁化电流为 10A 。传感器偏置磁
在漏磁检测过程中, 对于不同规格的滚子, 随 场的磁感应强度设置为 35mT , 仿真得到加偏置磁
着滚子直径的增加, 所需磁化强度越来越大, 而表 场前后的裂纹漏磁场信号如图 9 所示, 检测区域背
面微细裂 纹 产 生 的 漏 磁 场 强 度 较 小, 检 测 要 求 更
景磁场下降至约 0 mT , 根据仿真结果显示加偏置
加严格。因 此, 利 用 漏 磁 检 测 方 法 对 滚 子 进 行 微
磁场前后裂纹处的漏磁场云图如图 10 所示, 可见,
细裂纹检测时, 存在漏磁场小, 背景磁场大的检测 反向的偏置磁场对滚子的磁化状态有一定影响, 但
问题。漏磁 场 的 拾 取 主 要 依 靠 磁 传 感 器, 较 大 的 影响较小, 漏磁场强度峰峰值下降 15% 左右, 不影
背景磁场 会 导 致 传 感 器 超 量 程 饱 和, 出 现 灵 敏 度
响信号检出。
降低、 信号 失 真 甚 至 无 法 检 测 出 信 号 等 问 题。 常 为了保证偏置电流能够随背景磁场变化而相应
用的霍 尔 元 件 线 性 范 围 大, 但 灵 敏 度 较 低, TMR 改变, 采用了电流反馈控制系统, 主要包括 PLC ( 可
( 隧道磁电阻) 传感器相较于霍尔传感器、 AMR ( 各 编程逻辑控制器) 控制模块、 模拟量模块、 可控硅电
向异性磁阻) 以 及 GMR ( 巨 磁 阻), 具 有 良 好 的 温 源调节模块。控制调节变压器初级线圈中可控硅的
3
2022 年 第 44 卷 第 11 期
无损检测