
Page 45 - 无损检测2022年第四期
P. 45
王 瑶,等:
压力容器模拟缺陷的声发射定位
应的发射信号水平和上节试验标定出的声发射信号
衰减系数代入式( 2 ), 可确定声发射源位置。
( 1 )时差定位结果验证分析
根据任意两个传感器的安装位置、 信号到达时
间和标定的声发射信号传播速度, 可得到声发射源
和两个传感器的距离差, n 个传感器理论上可得到
2 个距离差; 由于压力容器结构非一体式, 信号传至
c n
上封头衰减较大, 通过数据筛选一共取 5 个通道, 共
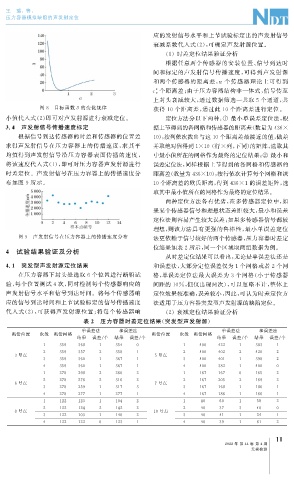
图 8 目标函数δ 的变化规律 获得 10 个距离差, 通过此 10 个距离差进行定位。
小值代入式( 2 ) 即可对声发射源进行衰减定位。 定位方法分以下两种: ① 最小单误差定位法, 根
3.4 声发射信号传播速度标定 据上节得到的各网格和传感器的距离差( 数量为436×
根据信号到达传感器的时差和传感器的位置差 10 ), 按列依次找出与这10个距离差最接近的值, 做差
求得声发射信号在压力容器上的传播速度, 求其平 并取绝对值得到1×10 ( 行×列, 下同) 的矩阵, 选取其
均值得到声发射信号沿压力容器表面传播的速度, 中最小值所在的网格作为最终的定位结果; ② 最小和
将该速度代入式( 1 ), 即可对压力容器声发射源进行 误差定位法, 同样根据上节得到的各网格和传感器的
时差定位。声发射信号在压力容器上的传播速度分 距离差( 数量为436×10 ), 按行依次计算每个网格和该
布如图 9 所示。 10个距离差的欧氏距离, 得到436×1的误差矩阵, 选
取其中最小值所在的网格作为最终的定位结果。
两种定位方法各有优劣, 在多传感器定位中, 如
果某个传感器信号和理想状态差距较大, 最小和误差
定位法则容易产生较大误差; 如果多传感器信号都较
理想, 则该方法具有更强的鲁棒性, 最小单误差定位
图 9 声发射信号在压力容器上的传播速度分布 法更依赖于信号较好的两个传感器, 压力容器时差定
位结果如表2所示, 同一个区域取两组数据为例。
4 试验结果验证及分析
从时差定位结果可以看出, 无论是单误差法还是
4.1 突发型声发射源定位结果 和误差法, 大部分定位误差仅为1个网格或者2个网
在压力容器下封头处选取 6 个位置进行断铅试 格, 单误差定位法最大误差为 3 个网格( 小于传感器
验, 每个位置测试 4 次, 同时检测每个传感器响应的 间距的10% , 但仅出现两次), 可以忽略不计, 整体上
声发射信号水平和信号到达时间。将每个传感器响 定位效果较准确, 误差较小, 因此, 可认为时差定位方
应的信号到达时间和上节试验标定的信号传播速度 法适用于压力容器突发型声发射源的缺陷定位。
代入式( 2 ), 可获得声发射源位置; 将每个传感器响 ( 2 )衰减定位结果验证分析
表 2 压力容器时差定位结果( 突发型声发射源)
单误差法 和误差法 单误差法 和误差法
断铅位置 次数 断铅网格 断铅位置 次数 断铅网格
结果 误差 / 个 结果 误差 / 个 结果 误差 / 个 结果 误差 / 个
1 359 368 1 354 0 1 400 422 1 383 1
2 359 357 2 358 1 2 400 402 2 420 2
3 号点 5 号点
3 359 360 1 367 1 3 400 401 1 398 2
4 359 360 1 367 1 4 400 382 1 400 0
1 278 298 2 260 2 1 167 167 0 165 2
2 278 276 2 316 2 2 167 205 2 169 2
6 号点 7 号点
3 278 259 1 317 3 3 167 168 1 186 1
4 278 277 1 277 1 4 167 186 1 166 1
1 122 123 1 104 2 1 40 60 1 58 2
2 122 124 2 142 2 2 40 37 3 40 0
8 号点 10 号点
3 122 103 1 140 2 3 40 41 1 24 1
4 122 122 0 123 1 4 40 39 1 61 2
1
1
2022 年 第 44 卷 第 4 期
无损检测