
Page 109 - 无损检测2022年第一期
P. 109
葛 松, 等:
用于水下目标监测的低频同振式矢量水听器研制
以三维压电加速度传感器作为矢量通道输出, 以压
1 同振式矢量水听器工作原理
电陶瓷圆管作为标量通道输出。为保证 3 个矢量通
1.1 加速度传感器原理 道的性能有较好的一致性, 将矢量水听器外形设计
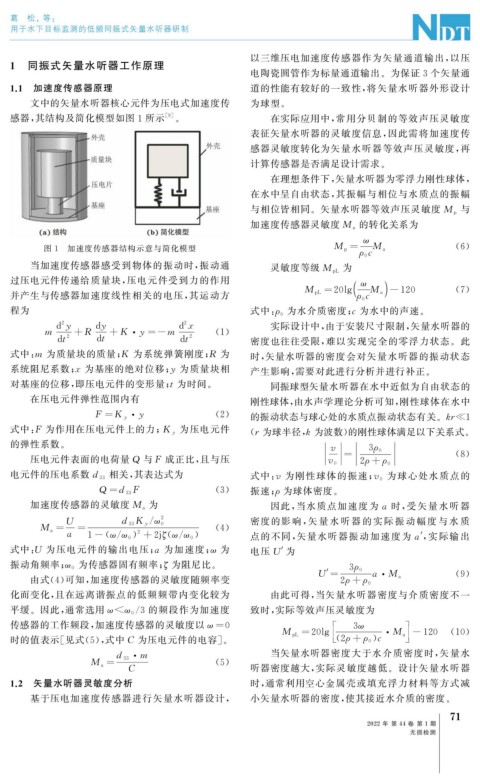
文中的矢量水听器核心元件为压电式加速度传 为球型。
感器, 其结构及简化模型如图 1 所示 [ 9 ] 。 在实际应用中, 常用分贝制的等效声压灵敏度
表征矢量水听器的灵敏度信息, 因此需将加速度传
感器灵敏度转化为矢量水听器等效声压灵敏度, 再
计算传感器是否满足设计需求。
在理想条件下, 矢量水听器为零浮力刚性球体,
在水中呈自由状态, 其振幅与相位与水质点的振幅
与
与相位皆相同。矢量水听器等效声压灵敏度 M p
的转化关系为
加速度传感器灵敏度 M a
ω
图 1 加速度传感器结构示意与简化模型 M p = M a ( 6 )
ρ 0 c
当加速度传感器感受到物体的振动时, 振动通 为
灵敏度等级 M p L
过压电元件传递给质量块, 压电元件受到力的作用 ω
M a -120
并产生与传感器加速度线性相关的电压, 其运动方 M p L = 20l g ρ 0 c ( 7 )
程为 式中: 为水介质密度; c 为水中的声速。
ρ 0
2
2
dy d y dx 实际设计中, 由于安装尺寸限制, 矢量水听器的
m 2 +R +K · y=-m ( 1 )
dt dt dt 2 密度也往往受限, 难以实现完全的零浮力状态。此
式中: m 为质量块的质量; K 为系统弹簧刚度; R 为 时, 矢量水听器的密度会对矢量水听器的振动状态
系统阻尼系数; x 为基座的绝对位移; 为质量块相 产生影响, 需要对此进行分析并进行补正。
y
对基座的位移, 即压电元件的变形量; t 为时间。 同振球型矢量水听器在水中近似为自由状态的
在压电元件弹性范围内有 刚性球体, 由水声学理论分析可知, 刚性球体在水中
F =K y y ( 2 ) 的振动状态与球心处的水质点振动状态有关。 kr≪1
·
为压电元件
式中: F 为作用在压电元件上的力; K y ( r 为球半径, k 为波数) 的刚性球体满足以下关系式。
的弹性系数。
v 3 ρ 0
压电元件表面的电荷量 Q 与F 成正比, 且与压 = ( 8 )
v 0 2 ρ+ ρ 0
相关, 其表达式为 为球心处水质点的
电元件的压电系数d 33
式中: v 为刚性球体的振速; v 0
Q = d 33 F ( 3 ) 振速; 为球体密度。
ρ
为 因此, 当水质点加速度为 a 时, 受矢量水听器
加速度传感器的灵敏度 M a
2
U d 33K y ω 0 密度的影 响, 矢 量 水 听 器 的 实 际 振 动 幅 度 与 水 质
/
M a= = ( 4 )
a 1- ω ω 0 2 +2 j ζ ω ω 0 点的不同, 矢量水听器振动加速度为 'a , 实际输出
(/ )
(/ )
式中: U 为压电元件的输出电压; a 为加速度; ω 为 电压 'U 为
为传感器固有频率; 为阻尼比。
振动角频率; ω 0 ζ 3 ρ 0
'=
由式( 4 ) 可知, 加速度传感器的灵敏度随频率变 U a·M a ( 9 )
2 ρ+ ρ 0
化而变化, 且在远离谐振点的低频频带内变化较为 由此可得, 当矢量水听器密度与介质密度不一
平缓。因此, 通常选用ω<ω 0 3 的频段作为加速度 致时, 实际等效声压灵敏度为
/
传感器的工作频段, 加速度传感器的灵敏度以ω= 0 3ω
M p L = 20l g ·M a -120 ( 10 )
)
时的值表示[ 见式( 5 ), 式中 C 为压电元件的电容]。 ( 2 ρ+ ρ 0 c
d 33 m 当矢量水听器密度大于水介质密度时, 矢量水
·
M a= ( 5 ) 听器密度越大, 实际灵敏度越低。设计矢量水听器
C
1.2 矢量水听器灵敏度分析 时, 通常利用空心金属壳或填充浮力材料等方式减
基于压电加速度传感器进行矢量水听器设计, 小矢量水听器的密度, 使其接近水介质的密度。
1
7
2022 年 第 44 卷 第 1 期
无损检测