
Page 93 - 无损检测2021年第二期
P. 93
王丙阳, 等:
金属点阵材料结构参数的 CT 检测
, 分别为 图 7 ( b ) 四个角的圆圈处], 端角处的干扰弧线增加
, ), 则中心坐标x 0 y 0
( x j y j
(
)/
x 0 = x i +x j 2 ( 2 ) 了图像的连通区域数量, 加大了椭圆识别的难度。
)/
(
y 0 = y i +y j 2 ( 3 ) 为准确对图像边缘进行提取, 识别有效连通区域, 在
, ) 与中 金属点阵结构工业 CT 检测中, 应及时校正探测器,
利用式( 4 ) 计算椭圆上任意一点( x k y k
心坐标点的最短距离l 。 优化检测参数, 减少伪影及其他干扰影像。
2
2
) ( )) ( 4 )
l=min ( ( x k -x 0 + y k -y 0
CT 切片插入金属点阵结构如图 6 所示( 图中
A 为点阵连接点, 1 , 2 , 3 , 4 为连接杆所在位置), 倾
斜角 ϕ 计算为
- 1
ϕ = arcsin ( l / L ) +π / 2 ( 5 )
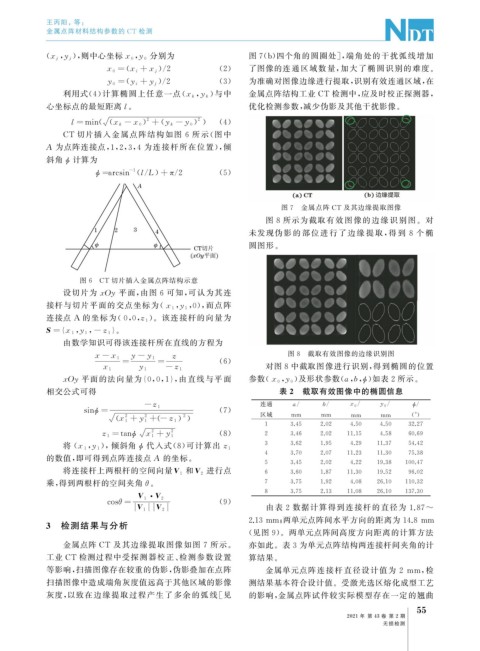
图 7 金属点阵 CT 及其边缘提取图像
图 8 所示为截取有 效 图 像 的 边 缘 识 别 图。对
未发现伪 影 的 部 位 进 行 了 边 缘 提 取, 得 到 8 个 椭
圆图形。
图 6 CT 切片插入金属点阵结构示意
设切片为 xO y 平面, 由图 6 可知, 可认为其连
接杆与切片平面的交点坐标为( x 1 y 1 0 而点阵
, ,),
)。该连接杆的向量为
连接点 A 的坐标为( 0 , 0 , z 1
{ , , }。
S= x 1 y 1 -z 1
由数学知识可得该连接杆所在直线的方程为
图 8 截取有效图像的边缘识别图
z
x -x 1 y-y 1
= = ( 6 )
x 1 y 1 -z 1 对图 8 中截取图像进行识别, 得到椭圆的位置
xO y 平面的法向量为{ 0 , 0 , 1 }, 由直线与平面 参数( x 0 y 0 ϕ
, ) 及形状参数( a , b , ) 如表 2 所示。
相交公式可得 表 2 截取有效图像中的椭圆信息
连通 a / b / x 0 / / ϕ /
- z 1 y 0
sin ϕ = ( 7 )
2 2 2 区域 mm mm mm mm ( ° )
x 1 +y 1 + -z 1
1 3.45 2.02 4.50 4.50 32.27
2 2 ( 8 )
z 1 = tan ϕ x 1 +y 1 2 3.46 2.02 11.15 4.58 60.69
, ), 倾斜角 3 3.62 1.95 4.29 11.37 54.42
将 ( x 1 y 1 ϕ 代入式( 8 ) 可计算出z 1
4 3.70 2.07 11.23 11.30 75.38
的数值, 即可得到点阵连接点 A 的坐标。
5 3.45 2.02 4.22 19.38 100.47
进行点
将连接杆上两根杆的空间向量V 1 和V 2 6 3.60 1.87 11.30 19.52 96.02
乘, 得到两根杆的空间夹角θ 。 7 3.75 1.92 4.08 26.10 110.32
8 3.75 2.13 11.08 26.10 137.30
·
V 1 V 2
cosθ= ( 9 )
由表 2 数据计算得到连接杆的直径为 1.87~
V 1 V 2
3 检测结果与分析 2.13mm ; 两单元点阵间水平方向的距离为 14.8mm
( 见图 9 )。两单元点阵间高度方向距离的计算方法
金属点阵 CT 及其边缘提取图像如图 7 所示。 亦如此。表 3 为单元点阵结构两连接杆间夹角的计
工业 CT 检测过程中受探测器校正、 检测参数设置 算结果。
等影响, 扫描图像存在较重的伪影, 伪影叠加在点阵 金属单元点阵连接杆直径设计值为 2 mm , 检
扫描图像中造成端角灰度值远高于其他区域的影像 测结果基本符合设计值。受激光选区熔化成型工艺
灰度, 以致在边缘提取过程产生了多余的弧线[ 见 的影响, 金属点阵试件较实际模型存在一定的翘曲
5
5
2021 年 第 43 卷 第 2 期
无损检测