
Page 47 - 无损检测2025年第三期
P. 47
仇茹嘉,等:
基于 TMR 传感器的盆式绝缘子螺栓松动程度检测系统
中,引入均方根差作为评估螺栓松动程度的参数,在 以随外界磁场的变化而发生翻转,各薄膜层的典型
减小了螺栓预载负荷的同时,也降低了螺栓连接头 厚度为 0. 1~100. 0 nm。
的谐振频率。随着人工智能、图像处理技术的兴起, 在量子力学的理论中,如果势垒层很薄,电子
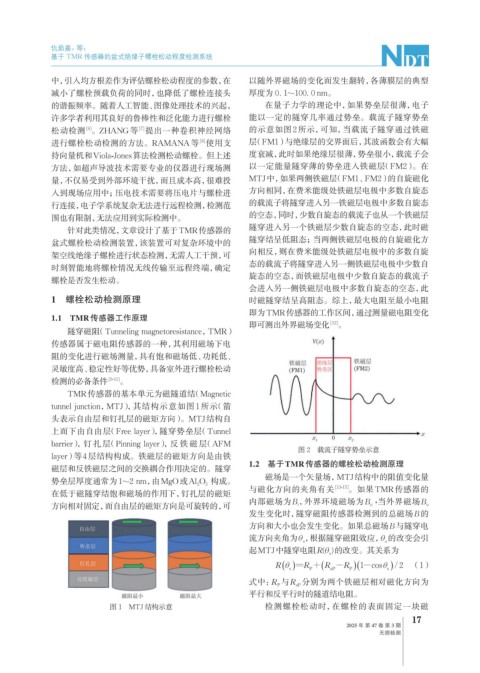
许多学者利用其良好的鲁棒性和泛化能力进行螺栓 能以一定的隧穿几率通过势垒。载流子隧穿势垒
松动检测 。ZHANG等 提出一种卷积神经网络 的示意如图 2 所示,可知,当载流子隧穿通过铁磁
[7]
[6]
进行螺栓松动检测的方法。RAMANA等 使用支 层(FM1)与绝缘层的交界面后,其波函数会有大幅
[8]
持向量机和Viola-Jones算法检测松动螺栓。但上述 度衰减,此时如果绝缘层很薄,势垒很小,载流子会
方法,如超声导波技术需要专业的仪器进行现场测 以一定能量隧穿薄的势垒进入铁磁层(FM2)。在
量,不仅易受到外部环境干扰,而且成本高,很难投 MTJ中,如果两侧铁磁层(FM1、FM2)的自旋磁化
入到现场应用中;压电技术需要将压电片与螺栓进 方向相同,在费米能级处铁磁层电极中多数自旋态
行连接,电子学系统复杂无法进行远程检测,检测范 的载流子将隧穿进入另一铁磁层电极中多数自旋态
围也有限制,无法应用到实际检测中。 的空态,同时,少数自旋态的载流子也从一个铁磁层
针对此类情况,文章设计了基于TMR传感器的 隧穿进入另一个铁磁层少数自旋态的空态,此时磁
盆式螺栓松动检测装置,该装置可对复杂环境中的 隧穿结呈低阻态;当两侧铁磁层电极的自旋磁化方
向相反,则在费米能级处铁磁层电极中的多数自旋
架空线绝缘子螺栓进行状态检测,无需人工干预,可
态的载流子将隧穿进入另一侧铁磁层电极中少数自
时刻智能地将螺栓情况无线传输至远程终端,确定
旋态的空态,而铁磁层电极中少数自旋态的载流子
螺栓是否发生松动。
会进入另一侧铁磁层电极中多数自旋态的空态,此
1 螺栓松动检测原理 时磁隧穿结呈高阻态。综上,最大电阻至最小电阻
即为TMR传感器的工作区间,通过测量磁电阻变化
1.1 TMR传感器工作原理
即可测出外界磁场变化 [12] 。
隧穿磁阻(Tunneling magnetoresistance,TMR)
传感器属于磁电阻传感器的一种,其利用磁场下电
阻的变化进行磁场测量,具有饱和磁场低、功耗低、
灵敏度高、稳定性好等优势,具备室外进行螺栓松动
检测的必备条件 [9-11] 。
TMR传感器的基本单元为磁隧道结(Magnetic
tunnel junction,MTJ),其结构示意如图 1 所示(箭
头表示自由层和钉扎层的磁矩方向)。MTJ结构自
上而下由自由层(Free layer),隧穿势垒层(Tunnel
barrier),钉扎层(Pinning layer),反铁磁层(AFM
图 2 载流子隧穿势垒示意
layer)等4层结构构成。铁磁层的磁矩方向是由铁
1.2 基于TMR传感器的螺栓松动检测原理
磁层和反铁磁层之间的交换耦合作用决定的。隧穿
势垒层厚度通常为1~2 nm,由MgO或Al O 构成。 磁场是一个矢量场,MTJ结构中的阻值变化量
3
2
在低于磁隧穿结饱和磁场的作用下,钉扎层的磁矩 与磁化方向的夹角有关 [13-15] 。如果TMR传感器的
方向相对固定,而自由层的磁矩方向是可旋转的,可 内部磁场为B,外界环境磁场为B , 当外界磁场B o
o
i
发生变化时,隧穿磁阻传感器检测到的总磁场B的
方向和大小也会发生变化。如果总磁场B与隧穿电
流方向夹角为θ ,根据隧穿磁阻效应,θ 的改变会引
s
s
起MTJ中隧穿电阻R(θ )的改变。其关系为
s
R ( )=R P + ( R aP -R P )(1-cos θ s ) /2 (1)
θ
s
式中:R 与R 分别为两个铁磁层相对磁化方向为
P aP
平行和反平行时的隧道结电阻。
图 1 MTJ 结构示意 检测螺栓松动时,在螺栓的表面固定一块磁
17
2025 年 第 47 卷 第 3 期
无损检测