
Page 108 - 无损检测2023年第九期
P. 108
项兴华, 等:
水轮机涡轮螺栓多通道超声波应力智能监测系统
图4 超声波应力检测仪系统构成
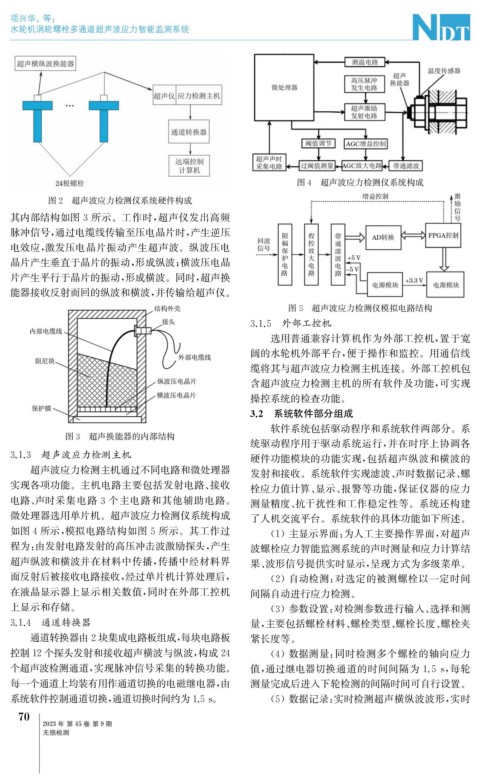
图2 超声波应力检测仪系统硬件构成
其内部结构如图3所示。工作时, 超声仪发出高频
脉冲信号, 通过电缆线传输至压电晶片时, 产生逆压
电效应, 激发压电晶片振动产生超声波。纵波压电
晶片产生垂直于晶片的振动, 形成纵波; 横波压电晶
片产生平行于晶片的振动, 形成横波。同时, 超声换
能器接收反射而回的纵波和横波, 并传输给超声仪。
图5 超声波应力检测仪模拟电路结构
3.1.5 外部工控机
选用普通兼容计算机作为外部工控机, 置于宽
阔的水轮机外部平台, 便于操作和监控。用通信线
缆将其与超声波应力检测主机连接。外部工控机包
含超声波应力检测主机的所有软件及功能, 可实现
操控系统的检查功能。
3.2 系统软件部分组成
软件系统包括驱动程序和系统软件两部分。系
图3 超声换能器的内部结构
统驱动程序用于驱动系统运行, 并在时序上协调各
3.1.3 超声波应力检测主机 硬件功能模块的功能实现, 包括超声纵波和横波的
超声波应力检测主机通过不同电路和微处理器 发射和接收。系统软件实现滤波、 声时数据记录、 螺
实现各项功能。主机电路主要包括发射电路、 接收 栓应力值计算、 显示、 报警等功能, 保证仪器的应力
电路、 声时采集电路 3 个主电路和其他辅助电路。 测量精度、 抗干扰性和工作稳定性等。系统还构建
微处理器选用单片机。超声波应力检测仪系统构成
了人机交流平台。系统软件的具体功能如下所述。
如图4所示, 模拟电路结构如图5所示。其工作过 ( 1 )主显示界面: 为人工主要操作界面, 对超声
程为: 由发射电路发射的高压冲击波激励探头, 产生 波螺栓应力智能监测系统的声时测量和应力计算结
超声纵波和横波并在材料中传播, 传播中经材料界 果、 波形信号提供实时显示, 呈现方式为多级菜单。
面反射后被接收电路接收, 经过单片机计算处理后, ( 2 )自动检测: 对选定的被测螺栓以一定时间
在液晶显示器上显示相关数值, 同时在外部工控机 间隔自动进行应力检测。
上显示和存储。 ( 3 )参数设置: 对检测参数进行输入、 选择和测
3.1.4 通道转换器 量, 主要包括螺栓材料、 螺栓类型、 螺栓长度、 螺栓夹
通道转换器由2块集成电路板组成, 每块电路板 紧长度等。
( 4 )数据测量: 同时检测多个螺栓的轴向应力
控制12个探头发射和接收超声横波与纵波, 构成24
个超声波检测通道, 实现脉冲信号采集的转换功能。 值, 通过继电器切换通道的时间间隔为 1.5s , 每轮
每一个通道上均装有用作通道切换的电磁继电器, 由 测量完成后进入下轮检测的间隔时间可自行设置。
系统软件控制通道切换, 通道切换时间约为1.5s 。 ( 5 )数据记录: 实时检测超声横纵波波形, 实时
7
0
2023年 第45卷 第9期
无损检测