
Page 94 - 无损检测2021年第七期
P. 94
钟芳桃, 等:
航空金属薄板分层缺陷的频率 - 波数域超声相控阵全聚焦法成像检测
,
聚焦; 利用 FMC 中得到的任意点的 A 扫信号 S i j
[ 17 ] 为
即可以得到任意聚焦点成像像素值I i j
N N
I i j x , z ) = ∑∑ S i j t i j ( 2 )
(
( )
i = 1 j= 1
1.3 频率 - 波数域算法全聚焦成像
频率 - 波数域算法的全聚焦成像与传统全聚焦
成像不同, 频 率 - 波 数 域 算 法 是 在 频 域 上 聚 焦 成 像
的。发射阵元i 坐标为( u , 0 ), 接收阵元 j 坐标为
图 2 TFM 成像算法原理示意 ( v , 0 ), 目标聚焦点坐标为( v , ), 发射阵元和接收
y
由式( 1 ) 可知, 对发射阵元i 、 接收阵元 j 加以 阵元与目标点的距离分别为r 1 和r 2 , 发射 - 接收阵
相 应的延时法则, 即可以对检测区域任意一点实现 元组的频率响应 [ 18 ] 为
-1
E ( ω , u , v ) =P ( ω ) 2 ×
( 4π )
ex pj k u u+ j k v v )
(
2
(
2
2
)
(
2
()
∬ 2 2 2 2∬ f x , z ) ex p -jk u +k v x - j k -k u + k -k v z dxdz dk u dk v 3
k -k u k -k v
式中: E ( ω , u , v ) 为全矩阵数据中的发射 - 接收阵元 f =
^ ( x , z )
组接收e ( t , u , v ) 信号的频率响应; P ( ω ) 为发射信 ∞
1
F
^ ( k x k z ex pj k x x + j k z z ) d k xdk z 9
号的频谱; ω 为角频率; ( x , z ) 为目标聚焦点的点 ( 2π ) ∬ , ) ( ()
f
2
-∞
, 分别为发射阵元( u , 0 ) 和接收阵元
散射函数; k u k v
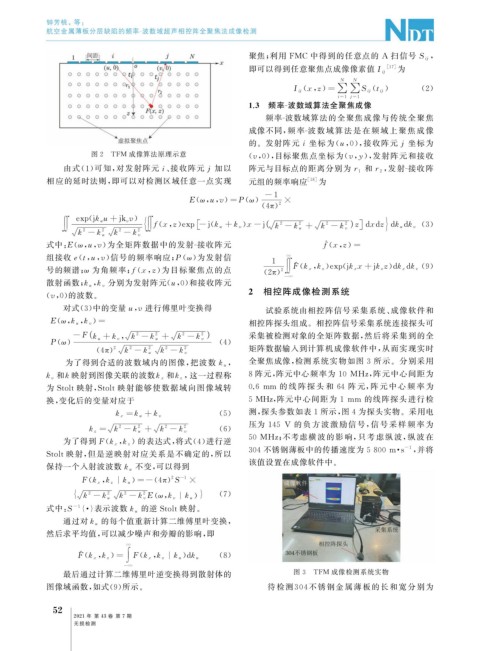
2 相控阵成像检测系统
( v , 0 ) 的波数。
对式( 3 ) 中的变量u , v 进行傅里叶变换得 试验系统由相控阵信号采集系统、 成像软件和
, )
E ( ω , k u k v = 相控阵探头组成。相控阵信号采集系统连接探头可
2
2
2
2
, k -k u + k -k v 采集被检测对象的全矩阵数据, 然后将采集到的全
-F k u +k v
P ( ω ) ( 4 )
2 2 2 2 2 矩阵数据输入到计算机成像软件中, 从而实现实时
( 4π ) k -k u k -k v
全聚焦成像, 检测系统实物如图 3 所示。分别采用
,
为了得到合适的波数域内的图像, 把波数k u
, 这一过程称 8 阵元, 阵元中心频率为 10 MHz , 阵元中心间距为
k v 和 k 映射到图像关联的波数 k x 和 k z
为 Stolt映射, Stolt映射能够使数据域向图像域转 0.6 mm 的 线 阵 探 头 和 64 阵 元, 阵 元 中 心 频 率 为
换, 变化后的变量对应于 5MHz , 阵元中心间距为 1 mm 的线阵探头进行检
测, 探头参数如表 1 所示, 图 4 为探头实物。采用电
( 5 )
k x = k u +k v
压为 145 V 的 负 方 波 激 励 信 号, 信 号 采 样 频 率 为
2 2 2 2 ( 6 )
k z = k -k u + k -k v
50MHz ; 不考虑横波的影 响, 只 考 虑 纵 波, 纵 波 在
, ) 的表达式, 将式( 4 ) 进行逆
为了得到 F ( k x k z
304不锈钢薄板中的传播速度为 5800m · s , 并将
-1
Stolt映射, 但是逆映射对应关系是不确定的, 所以
不变, 可以得到 该值设置在成像软件中。
保持一个入射波波数k u
2
)
,
(
F ( k x k z| k u =- 4π ) S - 1 ×
2 2 2 2 ( 7 )
k -k u k -k vE ω , k v| k u
式中: S -1 {·} 表示波数k u 的逆 Stolt映射。
的每个值重新计算二维傅里叶变换,
通过对k u
然后求平均值, 可以减少噪声和旁瓣的影响, 即
∞
F , ) , ) ( 8 )
∫
^ ( k x k z = F ( k x k z| k u d k u
-∞
最后通过计算二维傅里叶逆变换得到散射体的 图 3 TFM 成像检测系统实物
图像域函数, 如式( 9 ) 所示。 待检测 304 不锈钢金属薄板的长和宽 分 别 为
5
2
2021 年 第 43 卷 第 7 期
无损检测