
Page 151 - 无损检测2021年第四期
P. 151
院企风采
4 声鼠标(Acoustic Mouse)成像算法
声鼠标成像算法的原理是:通过图像降维算
法提取单个二维或者多维超声数据中的特征信号,
以该特征信号为标记采用相关性搜索算法,计算
时间序列相邻的两组数据之间的相对位移;再采
用叠加或者延续的方式将后一组数据拼接到之前
的数据上,通过一些连续数据的拼接实现无编码
图 7 图像拼接结果
的手动超声数据成像和存储,方便手动超声的数
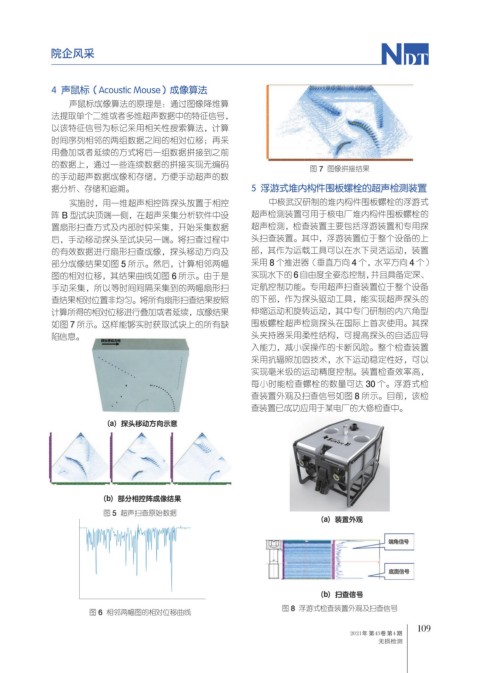
据分析、存储和追溯。 5 浮游式堆内构件围板螺栓的超声检测装置
实施时,用一维超声相控阵探头放置于相控 中核武汉研制的堆内构件围板螺栓的浮游式
阵 B 型试块顶端一侧,在超声采集分析软件中设 超声检测装置可用于核电厂堆内构件围板螺栓的
置扇形扫查方式及内部时钟采集,开始采集数据 超声检测,检查装置主要包括浮游装置和专用探
后,手动移动探头至试块另一端。将扫查过程中 头扫查装置。其中,浮游装置位于整个设备的上
的有效数据进行扇形扫查成像,探头移动方向及 部,其作为运载工具可以在水下灵活运动,装置
部分成像结果如图 5 所示。然后,计算相邻两幅 采用 8 个推进器(垂直方向 4 个,水平方向 4 个)
图的相对位移,其结果曲线如图 6 所示。由于是 实现水下的 6 自由度全姿态控制,并且具备定深、
手动采集,所以等时间间隔采集到的两幅扇形扫 定航控制功能。专用超声扫查装置位于整个设备
查结果相对位置非均匀。将所有扇形扫查结果按照 的下部,作为探头驱动工具,能实现超声探头的
计算所得的相对位移进行叠加或者延续,成像结果 伸缩运动和旋转运动,其中专门研制的内六角型
如图 7 所示。这样能够实时获取试块上的所有缺 围板螺栓超声检测探头在国际上首次使用。其探
陷信息。 头夹持器采用柔性结构,可提高探头的自适应导
入能力,减小误操作的卡断风险。整个检查装置
采用抗辐照加固技术,水下运动稳定性好,可以
实现毫米级的运动精度控制。装置检查效率高,
每小时能检查螺栓的数量可达 30 个。浮游式检
查装置外观及扫查信号如图 8 所示。目前,该检
查装置已成功应用于某电厂的大修检查中。
(a)探头移动方向示意
(b)部分相控阵成像结果
图 5 超声扫查原始数据
(a)装置外观
(b)扫查信号
图 8 浮游式检查装置外观及扫查信号
图 6 相邻两幅图的相对位移曲线
109
2021年 第43卷 第4 期
无损检测
无损检测