
Page 65 - 无损检测2025年第四期
P. 65
刘晏长:
装配式钢结构建筑抗侧力支架缺陷超像素级 Gabor 识别方法
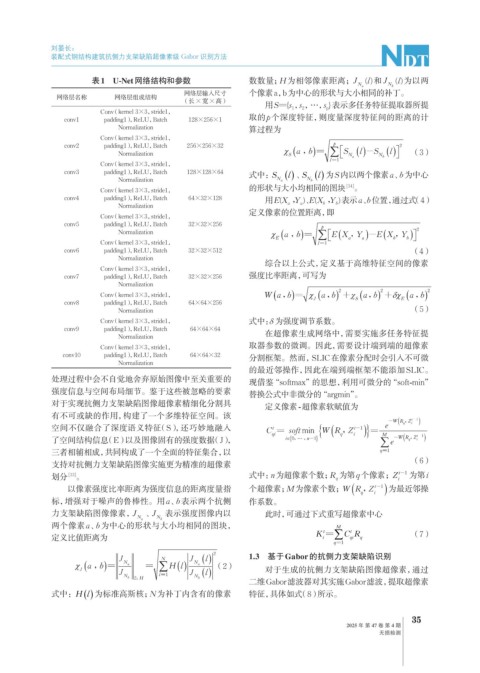
表1 U-Net网络结构和参数 数数量;H为相邻像素距离;J N a (l)和 J N b (l)为以两
网络层输入尺寸 个像素a,b为中心的形状与大小相同的补丁。
网络层名称 网络层组成结构
(长×宽×高)
用S={s ,s ,…,s }表示多任务特征提取器所提
Conv (kernel 3×3,stride1, 1 2 p
conv1 padding1),ReLU,Batch 128×256×1 取的p个深度特征,则度量深度特征间的距离的计
Normalization 算过程为
Conv (kernel 3×3,stride1,
conv2 padding1),ReLU,Batch 256×256×32
Normalization (3)
Conv (kernel 3×3,stride1,
S
S
conv3 padding1),ReLU,Batch 128×128×64 式中: ( ) l 、 ( ) l 为S内以两个像素a、b为中心
Normalization N a N b
Conv (kernel 3×3,stride1, 的形状与大小均相同的图块 [14] 。
conv4 padding1),ReLU,Batch 64×32×128 用E(X ,Y )、E(X ,Y )表示a、b位置,通过式(4)
Normalization a a b b
定义像素的位置距离,即
Conv (kernel 3×3,stride1,
conv5 padding1),ReLU,Batch 32×32×256
Normalization
Conv (kernel 3×3,stride1,
conv6 padding1),ReLU,Batch 32×32×512 (4)
Normalization
综合以上公式,定义基于高维特征空间的像素
Conv (kernel 3×3,stride1,
conv7 padding1),ReLU,Batch 32×32×256 强度比率距离,可写为
Normalization
Conv (kernel 3×3,stride1,
conv8 padding1),ReLU,Batch 64×64×256
Normalization (5)
Conv (kernel 3×3,stride1, 式中: δ 为强度调节系数。
conv9 padding1),ReLU,Batch 64×64×64 在超像素生成网络中,需要实施多任务特征提
Normalization
Conv (kernel 3×3,stride1, 取器参数的微调。因此,需要设计端到端的超像素
conv10 padding1),ReLU,Batch 64×64×32 分割框架。然而,SLIC在像素分配时会引入不可微
Normalization
的最近邻操作,因此在端到端框架不能添加SLIC。
处理过程中会不自觉地舍弃原始图像中至关重要的 现借鉴“softmax”的思想,利用可微分的“soft-min”
强度信息与空间布局细节。鉴于这些被忽略的要素 替换公式中非微分的“argmin”。
对于实现抗侧力支架缺陷图像超像素精细化分割具 定义像素-超像素软赋值为
有不可或缺的作用,构建了一个多维特征空间。该
空间不仅融合了深度语义特征(S),还巧妙地融入
了空间结构信息(E)以及图像固有的强度数据(J),
三者相辅相成,共同构成了一个全面的特征集合,以
(6)
支持对抗侧力支架缺陷图像实施更为精准的超像素
划分 [13] 。 式中:n为超像素个数;R 为第q个像素;Z i t -1 为第i
q
以像素强度比率距离为强度信息的距离度量指 个超像素;M为像素个数; 为最近邻操
标,增强对于噪声的鲁棒性。用a、b表示两个抗侧 作系数。
力支架缺陷图像像素,J N a 、J N b 表示强度图像内以 此时,可通过下式重写超像素中心
两个像素a、b为中心的形状与大小均相同的图块, t M t
定义比值距离为 K i = ∑ C R (7)
qi
q
q =1
1.3 基于Gabor的抗侧力支架缺陷识别
(2)
对于生成的抗侧力支架缺陷图像超像素,通过
二维Gabor滤波器对其实施Gabor滤波,提取超像素
Hl
式中: ( ) 为标准高斯核;N为补丁内含有的像素 特征,具体如式(8)所示。
35
2025 年 第 47 卷 第 4 期
无损检测