
Page 37 - 无损检测2023年第一期
P. 37
仝泽兴, 等:
路面裂缝检测融合分割方法
[
{
可能的为1 , 因此lo gT ( x )] 与lo g1-D [ G ( Z )]} 理时的计算量。 YOLOV5在特征提取网络的后端
应当尽可能地小, 直至接近于零。对于 G-Net , 若 添加了 SPP ( 空间金字塔池化) 层, 通过最大池化来
D [ G ( z )] 越接近1 , 则说明生成器生成的图像置信 增加主干特征的接收范围, 同时分离特征提取网络
度越高, 越能以假乱真地替代真实数据作为训练样 提取到的不同尺度的特征。特征融合网络采用与
本, 这 时 生 成 器 的 能 力 也 会 越 来 越 强, 因 此 YOLOV4相同的 FPN ( 区域选取) 与 PAN ( 路径聚
{
lo gD [ G ( z )]} 也应当越来越小。 G-Net与 D-Net 合网络) 的方式将深层特征图包含的强语义信息与
的相互博弈会使两个网络的性能交替上升, 与此同 浅层特征图包含的强定位信息充分融合, 提高检测
时, 两个网络的损失值也会越来越小。 GAN 网络的 的定位准度与语义信息强度。输出层采用 GIOU
总损 失 如 式 ( 3 ) 所 示 ( E 为 数 学 期 望), 其 中, ( 广义交并化) 损失与非极大值抑制的方法来提高检
[
min Tmax D V( D , G ) 为 lo gT ( x )] 的最小化与 D [ G ( Z )] 测的准确度与精度。
的最大化函数, 其目的是在两个网络博弈的过程中 2.2 图像分割模块
使得 D-Net的判别能力最大化和 G-Net与原始数 为使 YOLOV5网络能同时获取裂缝的相对位
据集分布的最小化。 置信息与形态延展信息, 需要在 YOLO V5网络中
[ lo gT( x ) ] + 嵌入图像分割模块。 PSPnet是现阶段效果较好的
min Tmax D V( D , G )= E x~ P
data ( x )
{
{ lo g1-D [ G ( z )]}} ( 3 ) 图像分割网络之一, 其核心模块为池化金字塔层。
zz
E z~ P ()
PSPnet 网络的结构图如图3所示( 图中 GAP为平均
2 PSP-YOLO 检测分割算法搭建
池化层, Conv为卷积层), PSPnet通过带有空洞卷积
2.1 YOLOV5目标检测网络 的特征提取网络 Resnet101 [ 10 ] 对输入图像进行8倍
下采样, 即下采样至输入图像尺寸的1 / 8 , 来获取更
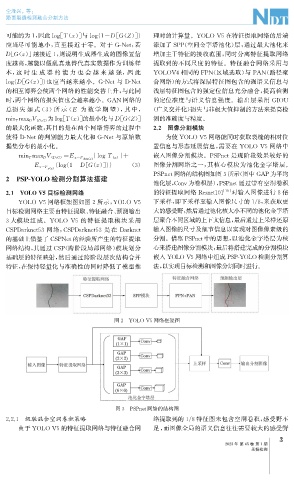
YOLOV5网络框架图如图2所示, YOLO V5
目标检测网络主要由特征提取、 特征融合、 预测输出 大的感受野, 然后通过池化核大小不同的池化金字塔
3大模块组成。 YOLO V5 的特征提取模块采用 层聚合不同区域的上下文信息, 最后通过上采样还原
输入图像的尺寸及细节信息以实现对图像像素级的
CSPDarknet53 网络, CSPDarknet53 是 在 Darknet
的基础上借鉴了 CSPNet 的经验所产生的特征提取 分割。借鉴 PSPnet 中的思想, 以池化金字塔层为核
网络结构, 其通过 CSP ( 跨阶段局部网络) 模块划分 心来搭建图像分割模块, 最后将搭建完成的分割模块
基础层的特征映射, 然后通过跨阶段层次结构合并 嵌入 YOLOV5网络中组成 PSP-YOLO 检测分割算
特征, 在保持轻量化与准确性的同时降低了模型推 法, 以实现目标检测和图像分割同时进行。
图2 YOLOV5网络框架图
图3 PSPnet 网络的结构图
2.2.1 级联混合空洞卷积策略 络提取到的1 / 8特征图未包含空洞卷积, 感受野不
由于 YOLOV5的特征提取网络与特征融合网 足, 而图像全局的语义信息往往需要较大的感受野
3
2023年 第45卷 第1期
无损检测