
Page 60 - 无损检测2021年第十期
P. 60
范伟诚, 等:
钢板受控射流超声检测用线聚焦探头检测灵敏度的影响因素
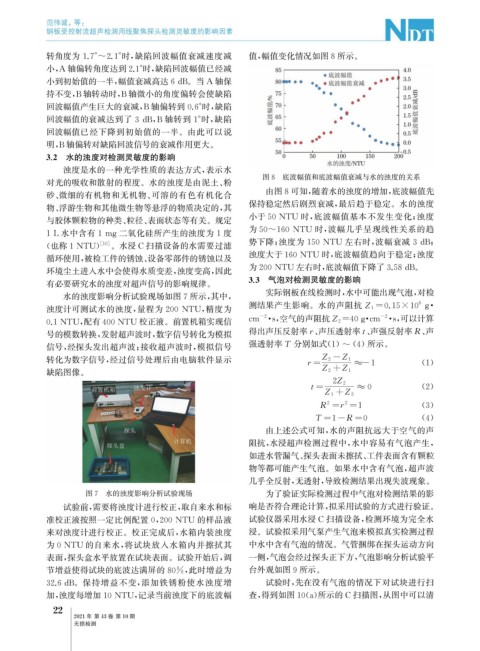
转角度为 1.7°~2.1° 时, 缺陷回波幅值衰减速度减 值, 幅值变化情况如图8所示。
小, A 轴偏转角度达到2.1° 时, 缺陷回波幅值已经减
小到初始值的一半, 幅值衰减高达6dB 。当 A 轴保
持不变, B轴转动时, B轴微小的角度偏转会使缺陷
回波幅值产生巨大的衰减, B 轴偏转到0.6° 时, 缺陷
回波幅值的衰减达到了 3dB , B 轴转到 1° 时, 缺陷
回波幅值已经下降到初始值的一半。由此可以说
明, B轴偏转对缺陷回波信号的衰减作用更大。
3.2 水的浊度对检测灵敏度的影响
浊度是水的一种光学性质的表达方式, 表示水
图8 底波幅值和底波幅值衰减与水的浊度的关系
对光的吸收和散射的程度。水的浊度是由泥土、 粉
由图8可知, 随着水的浊度的增加, 底波幅值先
砂、 微细的有机物和无机物、 可溶的有色有机化合
物、 浮游生物和其他微生物等悬浮的物质决定的, 其 保持稳定然后剧烈衰减, 最后趋于稳定。水的浊度
小于50NTU 时, 底波幅值基本不发生变化; 浊度
与胶体颗粒物的种类、 粒径、 表面状态等有关。规定
为50~160NTU 时, 波幅几乎呈现线性关系的趋
1L 水中含有1m g 二氧化硅所产生的浊度为1度
势下降; 浊度为150NTU 左右时, 波幅衰减 3dB ;
( 也称1NTU ) 。水浸 C扫描设备的水需要过滤
[ 10 ]
浊度大于160NTU 时, 底波幅值趋向于稳定; 浊度
循环使用, 被检工件的锈蚀、 设备零部件的锈蚀以及
环境尘土进入水中会使得水质变差, 浊度变高, 因此 为200NTU 左右时, 底波幅值下降了3.58dB 。
3.3 气泡对检测灵敏度的影响
有必要研究水的浊度对超声信号的影响规律。
实际钢板在线检测时, 水中可能出现气泡, 对检
水的浊度影响分析试验现场如图7所示, 其中,
6 ·
浊度计可测试水的浊度, 量程为 200NTU , 精度为 测结果产生影响。水的声阻抗 Z 1=0.15×10 g
-2
-2
·
0.1NTU , 配有400NTU 校正液。前置机箱实现信 cm · s , 空气的声阻抗Z 2=40 gcm · s , 可以计算
号的模数转换, 发射超声波时, 数字信号转化为模拟 得出声压反射率 r 、 声压透射率 t 、 声强反射率R 、 声
()
信号, 经探头发出超声波; 接收超声波时, 模拟信号 强透射率T 分别如式( 1 ) ~ 4 所示。
转化为数字信号, 经过信号处理后由电脑软件显示 Z 2-Z 1
r= ≈-1 ( 1 )
缺陷图像。 Z 2+Z 1
2Z 2
t= ≈0 ( 2 )
Z 1+Z 2
2 2
R = r = 1 ( 3 )
T = 1-R = 0 ( 4 )
由上述公式可知, 水的声阻抗远大于空气的声
阻抗, 水浸超声检测过程中, 水中容易有气泡产生,
如进水管漏气、 探头表面未擦拭、 工件表面含有颗粒
物等都可能产生气泡。如果水中含有气泡, 超声波
几乎全反射, 无透射, 导致检测结果出现失波现象。
图7 水的浊度影响分析试验现场 为了验证实际检测过程中气泡对检测结果的影
试验前, 需要将浊度计进行校正, 取自来水和标 响是否符合理论计算, 拟采用试验的方式进行验证。
准校正液按照一定比例配置0 , 200NTU 的样品液 试验仪器采用水浸 C 扫描设备, 检测环境为完全水
来对浊度计进行校正。校正完成后, 水箱内装浊度 浸。试验拟采用气泵产生气泡来模拟真实检测过程
为0NTU 的自来水, 将试块放入水箱内并擦拭其 中水中含有气泡的情况。气管捆绑在探头运动方向
表面, 探头盒水平放置在试块表面。试验开始后, 调 一侧, 气泡会经过探头正下方, 气泡影响分析试验平
节增益使得试块的底波达满屏的80% , 此时增益为 台外观如图9所示。
32.6dB 。保持增益不变, 添加铁锈粉使水浊度增 试验时, 先在没有气泡的情况下对试块进行扫
加, 浊度每增加10NTU , 记录当前浊度下的底波幅 查, 得到如图10 ( a ) 所示的 C扫描图, 从图中可以清
2
2
2021年 第43卷 第10期
无损检测